
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
31 - 40 / 6,854
車外環境認識装置および車外環境認識方法
【課題】発光源が点灯したときの絶対的な輝度を利用して、発光源の点灯有無を高精度に判断する。
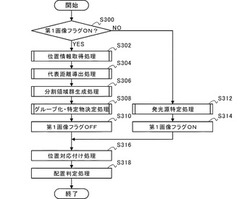
【解決手段】車外環境認識装置は、車外環境の明るさに応じた第1露光態様で第1画像を取得すると共に、発光源が自発光しているか否かを判別可能な、露光時間が第1露光態様と異なる第2露光態様で第2画像を取得し、第1画像に基づき検出領域内で先行する車両が占有する車両領域を特定し、第2画像の輝度に基づいて発光源の位置を特定し、車両領域と発光源の位置とを対応付ける(S316)。
(もっと読む)
車載緊急通報装置

【課題】低温時のバックアップ電池の放電性能を低く設定することが可能な構成として、安価なバックアップ電池を搭載する。
【解決手段】車両が衝突したと判定されたときに緊急通報信号を通信網4を通じてセンター装置3に送信する機能を有し、車両バッテリ17から供給される電力を動作電力として動作するように構成された車載緊急通報装置2において、車両バッテリ17から供給される電力が低下したときに、車載緊急通報装置2に動作電力を供給するバックアップ電池19と、バックアップ電池19の電池能力を測定する測定手段21と、測定手段21により測定された電池能力が低いときに、車載緊急通報装置2の機能を制限する制限手段5とを備えた。
(もっと読む)
物体検知装置
【課題】前方に位置する物体を検知する機能に加えて、降雨状態を検知する機能を有し、この機能にかかる降雨状態の検知精度を向上させた物体検知装置を提供する。
【解決手段】雨滴検知用PD41は、視野制限部材50により、反射光を受光する検知視野が第1の物体検知用PD42、および第2の物体検知用PD43の検知視野と異なる領域に制限されている。雨滴検知用PD41は、雨滴検知領域における、雨滴からの反射光を受光する。第1の物体検知用PD42、および第2の物体検知用PD43は、物体からの反射光を受光する。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】人の下部領域(下半身)を通じて人を直接特定することで、人の特定効率および特定精度の向上を図る。
【解決手段】車外環境認識装置130は、検出領域内の画像を取得し、取得した画像において道路表面に相当する平面から予め定められた高さまでの領域にある複数のブロックを、ブロック同士の第1の相対関係に基づいてグループ化し、ブロック群を生成し、ブロック群を画像の水平方向に対して2分割し、2分割したブロック群同士の第2の相対関係に基づいて、ブロック群が人の候補である第1人候補であるか否か判定する。
(もっと読む)
追従制御装置
【課題】自車両を先行車に適切に追従させる。
【解決手段】追従制御装置(100)は、通信により取得された先行車(20)に係る舵角情報に基づいて、自車両(10)を先行車に追従させる制御である追従制御を実施可能な追従制御装置である。該追従制御装置は、追従制御が実施されておらず、且つ、自車両の直進走行時における(i)先行車に係る舵角情報及び(ii)自車両に係る舵角を、夫々取得する取得手段(15)と、取得された先行車に係る舵角情報と取得された自車両に係る舵角との差分を算出し、該算出された差分を自車両の舵角中点として設定する設定手段(15)と、を備える。
(もっと読む)
車外環境認識装置および車外環境認識方法
【課題】対象物の特定精度を向上する。
【解決手段】
車外環境認識装置130は、複数の色識別子と輝度範囲とを対応付けて保持しておき、車外環境を撮像した画像を取得し、自車両との相対的な位置関係に応じて画像の検出領域を複数の特定領域に分割し(S306)、特定領域毎に色識別子に対応付けられた輝度範囲を再設定し(S308)、検出領域内の複数の対象部位の輝度と対象部位が位置する特定領域に再設定された輝度範囲とに基づいて、対象部位に色識別子を設定し(S310)、水平距離の差分および高さの差分が所定範囲内にある1または複数の対象部位をグループ化する(S312)。
(もっと読む)
車線変更支援装置
【課題】より安全性の高いECOモード走行時の車線変更を実現する。
【解決手段】ECOモード走行中において、隣接車線に後続車両22が確認される場合に車線変更する際、後続車両22との車間距離が車線変更判断距離L以上であればECOモードを解除することでスムーズな車線変更を可能とし、また、車線変更判断距離L未満であれば警報により運転者に車線変更の先送りを促すことで、より安全性の高いECOモード走行時の車線変更を実現する。
(もっと読む)
車両周辺監視用画像生成装置
【課題】魚眼レンズのような広角レンズを用いた撮影画像であっても、車両周辺監視に適したモニタ表示画像を作成することができる画像生成装置の提供。
【解決手段】広角レンズを装着した車載カメラ1によって取得された車両周辺の撮影画像を入力する画像入力部51と、撮影画像の横方向に延びる歪み補正基線によって上下方向で区分けされた撮影画像領域に対して個別に、広角レンズの縦方向のレンズ歪みを補正する画素単位の歪み補正量の強度を設定する補正強度設定部55と、補正強度設定部55によって設定された歪み補正強度に基づいて撮影画像に対する歪み補正を実行する歪み補正実行部54と、歪み補正実行部54によって補正された撮影画像からモニタ表示画像を出力するモニタ表示画像出力部58とが備えられている。
(もっと読む)
運転支援装置
【課題】適切に運転支援を行うことができる運転支援装置を提供することを目的とする。
【解決手段】自車両2の運転を支援する運転支援情報を出力可能である支援装置4と、検知した他車両及び通行者に応じて支援装置4を制御する制御装置5とを備え、制御装置5は、自車両2の走行位置に基づいて、他車両及び通行者の検知領域を変更することを特徴とする。したがって、運転支援装置1は、例えば、不要情報の提示を抑制し、適切に運転支援を行うことができる、という効果を奏する。
(もっと読む)
車線境界線認識装置
【課題】車線境界線の検出精度の改善。
【解決手段】車両の進行方向の路面の画像を所定時間の経過毎に取得し(ステップ210)、その画像に基いて輝度の変化点をエッジ点として抽出する(ステップ220)。更に、抽出されたエッジ点を通る白線候補線を抽出し(ステップ230)、その抽出された白線候補線の中から所定の条件を満足する白線候補線を車線境界線として選択する(ステップ250)。この車線境界線認識装置は、前記抽出されたエッジ点のうちの前記白線候補線が通過するエッジ点の個数をシグナル量Sと見做すとともに、前記抽出されたエッジ点のうちの前記白線候補線が通過しないエッジ点の個数をノイズ量Nと見做し、前記ノイズ量に対する前記シグナル量の割合に応じた値(S/N比)に基づいて算出される画像評価値(ステップ240を参照。)が閾値よりも小さい場合には前記画像に基く前記車線境界線の選択結果を破棄する(ステップ260)。
(もっと読む)
31 - 40 / 6,854
[ Back to top ]