
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
51 - 60 / 6,854
運転支援装置
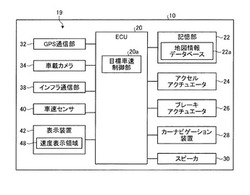
【課題】運転者の運転をより適切に支援することができる運転支援装置を提供すること。
【解決手段】車両の運転を支援する運転支援装置であって、車速センサで検出した現車速、位置算出部で算出した車両と信号機が配置された信号機地点との相対位置情報およびインフラ通信部で取得した信号サイクルとの情報に基づいて、現車速で走行した場合に信号機地点に到達する到着タイミングを検出し、到着タイミングが、信号機が通過可能な表示ではない状態から信号機が通過可能な表示である状態に切り替わるよりも閾値時間前から信号機が通過可能な表示である状態から信号機が通過可能な表示ではない状態に切り替わってから閾値時間経過後までの間にある場合、信号機が配置された信号機地点を前記車両が通過できる速度域を目標車速域として決定する。
(もっと読む)
運転支援装置

【課題】2車両間で相互に協調した運転支援情報を出力する。
【解決手段】自車両Aで重要な警告度が解析された場合に、警告判断部33が送受信部37を介してその自車両解析警告度を含めた警告発信情報をその接触対象となる他車両に対して送信する。また逆に、送受信部37が近隣車両から当該自車両Aに対して送信された警告発信情報を受信した場合には、警告判断部33がその受信した警告発信情報に含まれる警告度と、自車両Aが解析した自車両解析警告度とを比較し、より接触可能性の高い方の警告度に対応した警告指示をディスプレイ12に表示させるよう判断する。これにより、自車両Aと特定の近隣車両との間で同じ程度に協調させた警告度をそれぞれほぼ同時に報知させることができ、相互に接触を回避させることができる。
(もっと読む)
歩行者認識装置
【課題】上半身が画像上で確認できない状況下おける歩行者の認識の精度をさらに向上させる。
【解決手段】撮像画像中の右斜めに傾いた第1特徴エッジ、左斜めに傾いた第2特徴エッジ、及び当該第1特徴エッジの上端と当該第2特徴エッジの上端とを結ぶ第3特徴エッジからなる特徴形状をもとに、撮像画像から検出した歩行者候補が歩行者であるか否かを判定して歩行者の認識を行う。
(もっと読む)
車両走行支援装置
【課題】分岐路の判定を誤って行った場合でも、誤りを早期に認識して訂正することができ、実際の左右の境界線に基づく走行支援制御を行う。
【解決手段】カメラにより取得された車両の進行方向の路面の画像に基いて、路面の「左側境界線及び右側境界線」を検出する。本線から分岐する分岐路が存在している場合に「車両が進行するに連れて大きさが大きくなる分岐路指標値BRH」を前記検出された「左側境界線及び右側境界線」に基いて取得するとともに、その分岐路指標値の大きさが第1閾値A1以上であるとき分岐路が存在していると判定する(ステップ520及びステップ530)。更に、分岐路が存在していると判定した後に取得される分岐路指標値BRHの大きさが「第1閾値A1以下である分岐判定終了閾値(第2閾値A2)」よりも小さくなった場合、前記分岐路が存在しているとの判定を取り消すように構成されている(ステップ550及びステップ570)。
(もっと読む)
車両周辺監視装置
【課題】画像から検知された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】第1表示部(26)と、第2表示部(28)と、1つのサブ領域(74、76、78)から2以上の監視対象物(H1〜H3)が検知されたか否かを判別する検知数判別部(52)とを備える。検知したと判別された場合、第2表示部(28)は、2以上の監視対象物(H1〜H3)が存在する旨を示す第1モード、及び2以上の監視対象物が存在する位置を示す第2モードに順次切り替えて各マーク(94、96、98、100)を表示する。
(もっと読む)
到達時間推定装置、到達時間推定方法、到達時間推定プログラム、及び情報提示装置
【課題】到達時間をより確実に推定することができる到達時間推定装置、到達時間推定方法、到達時間推定プログラム及び情報提示装置を提供する。
【解決手段】画像入力部は、画像信号をフレーム毎に入力し、物体検知部は、画像入力部から入力された画像信号が表す物体を検知し、到達時間算出部は、物体検知部が検知した物体までの方向を表す方向ベクトルに基づいて前記画像信号を撮影した撮影装置の光軸の回転を表す回転行列を算出し、過去の方向ベクトルに前記算出した回転行列を乗じたベクトルと、現在の方向ベクトルとに基づいて前記物体までの距離の変化を算出し、算出した距離の変化に基づいて当該物体までの到達時間を算出する。
(もっと読む)
車載緊急通報装置および補助バッテリ装置
【課題】補助バッテリの不活性膜を除去することができ、補助バッテリの残容量を長期間に亘り確保する。
【解決手段】補助バッテリ装置3の制御部21は、温度センサ24を用いて補助バッテリ19の温度またはその周囲温度を検出し、演算周期ごとに、検出温度と当該演算周期と不活性膜の成長特性とから定まる不活性膜の成長量を積算する。この積算値が規定値を超えたときにリフレッシュフラグをセットする。制御部21は、セルフチェック要求時にリフレッシュフラグがセットされていると、放電指令信号を出力する。放電回路20は、放電指令信号によりスイッチ20aをオン駆動し、不活性膜を除去するのに十分な大きさの電流を補助バッテリ19に流す。
(もっと読む)
車両の危険度判定システム及び車両の危険度判定装置並びにこれらを用いた車両の危険報知装置
【課題】複数人の端末保持者にかかる情報を適切に扱うことができるようにした、車両の危険度判定システム及び車両の危険度判定装置と、これらの危険度判定システム及び危険度判定装置を用いて、車両の運転者に複数人の端末保持者にかかる危険度を適切に報知することができるようにした、車両の危険報知装置とを提供する。
【解決手段】
車両位置検出手段11により検出された車両1の位置と、端末位置検出手段21により検出された端末保持者の位置と、典型事故パターンデータベース10に記録された事故パターンとに基づいて、状況危険度判定手段60により判定された状況危険度を重み付けし、端末保持者の車両1に対する危険度である総合危険度を判定する総合危険度判定手段15aを備える。
(もっと読む)
車両用衝突危険予測装置及び車両用衝突危険予測システム
【課題】ドライバーの死角にある衝突可能性がある物体についての情報を検出可能とした、車両用衝突危険予測装置を提供する。
【解決手段】ミリ波〜サブミリ波と呼ばれる波長の電磁波で画像を撮像して出力するミリ波撮像部と、紫外線〜可視光〜近赤外線と呼ばれる波長の電磁波で画像を撮像して出力する可視光撮像部と、前記ミリ波撮像部の出力画像から、所定の物体を画像処理によって検知する第1検出部と、該第1検出部で検知した所定の物体の検出結果を出力し、所定の物体についての警告音の音声信号を生成する危険予測部と、前記第1検出部において検知した所定の物体の出力画像を前記可視光撮像部の出力画像に重畳した合成画像を生成する画像合成部とを有する。
(もっと読む)
車両衝突回避及び緩和システム
【課題】複数の車両の間の切迫した衝突によるダメージを共同で低減するためのシステム及び方法の提供。
【解決手段】複数の車両の間の切迫した衝突によるダメージを共同で低減するシステムが、感知装置、プロセッサ、メモリ、出力装置、及び通信装置を有する。感知装置は、複数の車両の近く、周囲、内部、または関連の状況を感知する。メモリは、プロセッサと電気的に通信し、プロセッサにより実行されるプログラミングコードを有する。プログラミングコードは、感知装置によって感知された感知状態を分析し、複数の車両の間の切迫した衝突によるダメージを共同で低減するために命令を複数の車両に共同で決定し出力する様に構成されている。出力装置は、共同で決定された出力命令を複数の車両に出力し、または実行する。通信装置は、感知された状態を感知装置からプロセッサに通信し、共同で決定した出力命令をプロセッサから出力装置に通信する。
(もっと読む)
51 - 60 / 6,854
[ Back to top ]