
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
71 - 80 / 6,854
車両周辺監視装置
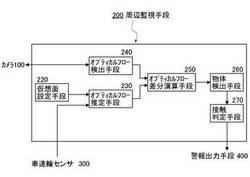
【課題】物体が存在しない場所で、誤ってオプティカルフローを検出することのない車両周辺監視装置を提供する。
【解決手段】カメラ(撮像手段)100で異なる時刻に撮像した2つの画像に基づいて、オプティカルフロー検出手段240が第1のオプティカルフロー(F1)を検出し、オプティカルフロー推定手段230が、仮想面設定手段220によって路面から所定距離だけ高い位置に設定された第1の仮想面の上に生じる第2のオプティカルフロー(F2)を推定して、オプティカルフロー差分演算手段250が、F1からF2を差し引いて、物体検出手段260が、差分演算結果に基づいて車両の周辺に存在する物体を検出し、接触判定手段270が、物体が車両10に接触する可能性があると判定したときに、警報出力手段400が警報を出力する。
(もっと読む)
運転支援装置

【課題】立体表示された走行予想軌跡線の下枠線と上枠線の関係を直感的に判断することのできる運転支援装置を提供することを目的とする。
【解決手段】撮像装置7から入力された自車両外部の撮像画像に不揮発性メモリ4から読み出された自車両の立体的な走行予想軌跡線30を重畳して外部の表示装置12に出力する映像処理装置3と、ステアリングセンサ10から入力されたハンドル角度信号に基づいて、映像処理装置3が重畳する立体的な走行予想軌跡線30の向きを制御する制御手段5とを備え、走行予想軌跡線30は、立体の下面側を示す第1の軌跡線31と立体の上面側を示す第2の軌跡線32とを有し、かつ、立体側面33を第1の軌跡線31と前記第2の軌跡線32で挟まれた空間で構成し、制御装置5は、映像処理装置3に、走行予想軌跡線30の立体側面33の色の濃度を高さ方向に向けて段階的に変化させる。
(もっと読む)
車線判別装置
【課題】登坂車線を簡易に且つ確実に判別することができる車線判別装置を提供する。
【解決手段】車両2に搭載される車線判別装置であって、車両2の走行中に走行する道路上の車線境界線を含む車両2の前方の画像を所定期間連続して取得する画像取得手部30と、連続する画像の各画像内に同一の車線境界線が存在するか否かを判定する境界線判定部43と、同一の車線境界線が存在すると境界線判定部43が判定した場合、画像の車線境界線上において画像濃度が所定値以上変化する点を車線境界線のエッジ点として画像毎に抽出するエッジ点抽出部44と、抽出された車線境界線のエッジ点の数を画像毎に集計する集計部45と、連続する画像において、集計したエッジ点の数の所定期間における周期的な変化に基づいて、車線境界線が登坂車線と走行車線との車線境界線であるか否かを判別する境界線判別部46と、を備える。
(もっと読む)
車両周辺監視装置
【課題】単一の撮像装置で撮像した場合であっても、カーブミラーを歩行者と誤検知する可能性を軽減することができる車両周辺監視装置を提供する。
【解決手段】カーブミラー判定部104は、撮像画像から略円形の物体又は略四角形の物体をカーブミラー可能性物体、すなわち人体の頭部候補及びミラー本体候補として抽出するカーブミラー可能性物体抽出部104aと、抽出された前記カーブミラー可能性物体の近傍に支柱形状の物体の有無を検知する支柱形状物体検知部104bと、を有し、抽出された前記カーブミラー可能性物体の近傍に前記支柱形状の物体が検知された場合、前記カーブミラー可能性物体を前記カーブミラーであると決定する。
(もっと読む)
車両用スポットランプ制御装置および車両用スポットランプシステム
【課題】歩行者に与えるグレアを抑制しつつ当該歩行者に車両の存在を適切に認識させ、さらに当該歩行者の存在を運転者に適切に認識させる。
【解決手段】車両用スポットランプ制御装置において、歩行者位置取得部は、位置検出装置によって検出された歩行者位置を取得する。点灯制御部は、照射位置を変更可能な車両用スポットランプによる光の照射を制御する。点灯制御部は、歩行者位置が取得された場合、歩行者位置を含む領域と歩行者位置よりも車両寄りの領域によって構成される第1領域にまず光を照射する。第1領域に所定時間光が照射されると、点灯制御部は、第1領域から歩行者の顔の位置を含む領域を削除した第2領域に光を照射する。これにより点灯制御部は、顔の位置に所定時間光を照射した後に、光が照射されている領域の上端を顔の位置よりも下方に移動させる。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かの判定や、カーブしている車線境界線の認識を、簡易な構成において実現できる「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の垂線の傾きを用いて、後方の白線を近似する円の半径を、車線の曲率半径rを算出し、曲率半径rが所定値より大きい場合には、走行中の車線がカーブしている車線であると判定し、白線を円で近似し、他の場合には、走行中の車線が直進している車線であると判定し、白線を直線で近似する。
(もっと読む)
駐車支援装置
【課題】駐車エリア内にある突出体の存在を考慮して駐車を支援できる。
【解決手段】 車両の駆動を制御する制御手段と、車両周囲の突出体を検出する検出手段と、前記突出体を囲む所定のエリア内に前記車両を誘導するための誘導経路を生成する生成手段と、を有する。前記制御手段は、前記誘導経路に従って前記所定のエリア内に前記車両を誘導する際、前記車両が前記突出体に所定の距離まで近づくと、前記車両の駆動を遅くする。
(もっと読む)
車両周辺監視装置
【課題】画像から検出された監視対象物の存否及び位置を極めて容易に把握可能な車両周辺監視装置を提供する。
【解決手段】車両周辺監視装置(10)は、撮像画像(IL)に基づいて監視対象物を検出する対象物検出部(60)と、撮像画像(IL)内における前記監視対象物の位置を算出する位置算出部(66)と、前記監視対象物までの距離を算出する距離算出部と(64)、撮像画像(IL)を汎用ディスプレイ(26)に表示させるとともに、前記監視対象物を強調表示させる第1表示制御部(72)と、前記監視対象物の撮像画像(IL)内における位置に対応する表示位置で、該監視対象物をシンボル化したマークをMID(28)に表示させる第2表示制御部(74)とを備え、第2表示制御部(74)は、前記監視対象物の撮像画像(IL)内における位置及び該監視対象物までの距離に応じて、ブレーキを促す旨及び回避方向のどちらか一方を表示させる。
(もっと読む)
対象物接近通知システム、対象物接近通知方法およびヘッドレスト
【課題】車両の運転者に、車両周囲の障害物の存在を直感的に伝えることができる対象物接近通知システムを提供する。
【解決手段】自車両の周囲に存在する対象物を検出し、自車両に対する方向を決定する対象物検出手段と、運転者に対して前記決定された方向から到来する音を弱める弱音手段と、を有することを特徴とする。また、前記対象物検出手段が検出した対象物のうち、運転者に通知すべき対象物を決定する通知決定手段をさらに備えていることが好ましい。また、前記弱音手段は、運転者の頭部に対して左右後方に配置された二つ以上の弱音装置によって音を弱めるようにしても良く、前記弱音手段は、特定の方向より運転者の耳に到来する音を遮る位置に遮蔽体が移動することで音を弱めるようにしても良い。
(もっと読む)
衝突回避信号
【課題】車両衝突回避シグナリング方法およびシステム。
【解決手段】衝突信号は、運転者が適切にブレーキをかけるために、注意散漫な運転者の注意を引きつける。車両衝突警告信号および照明システムは、接近している運転者に、停止したまたは減速した車両があることを、ストロボまたは点滅照明システムを介して自動的に警報する。搭乗している運転者も接近している車両に対して注意喚起される。後方車両センサは、後方から接近している車両を検知して、接近している車両の距離、速度、および減速度を求める。プロセッサは信号を処理して、搭載車両の速度計信号およびブレーキシステムに組み入れる。接近車両の接近率がその車両のロケーションと比較して極端に高いと判断される場合、眩しいストロボ信号がブレーキ信号とともに自動的に与えられる。ストロボ警告の強度は、車両が接近している速度および距離によって決定される。
(もっと読む)
71 - 80 / 6,854
[ Back to top ]