
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
81 - 90 / 6,854
対象物接近通知システム、対象物接近通知方法およびヘッドレスト
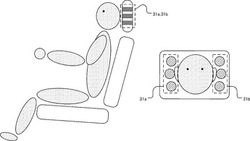
【課題】車両の運転者に、車両周囲の障害物の存在を直感的に伝えることができる対象物接近通知システムを提供する。
【解決手段】自車両の周囲に存在する対象物を検出し、自車両に対する方向を決定する対象物検出手段と、運転者に対して前記決定された方向から到来する音を弱める弱音手段と、を有することを特徴とする。また、前記対象物検出手段が検出した対象物のうち、運転者に通知すべき対象物を決定する通知決定手段をさらに備えていることが好ましい。また、前記弱音手段は、運転者の頭部に対して左右後方に配置された二つ以上の弱音装置によって音を弱めるようにしても良く、前記弱音手段は、特定の方向より運転者の耳に到来する音を遮る位置に遮蔽体が移動することで音を弱めるようにしても良い。
(もっと読む)
衝突回避信号
【課題】車両衝突回避シグナリング方法およびシステム。
【解決手段】衝突信号は、運転者が適切にブレーキをかけるために、注意散漫な運転者の注意を引きつける。車両衝突警告信号および照明システムは、接近している運転者に、停止したまたは減速した車両があることを、ストロボまたは点滅照明システムを介して自動的に警報する。搭乗している運転者も接近している車両に対して注意喚起される。後方車両センサは、後方から接近している車両を検知して、接近している車両の距離、速度、および減速度を求める。プロセッサは信号を処理して、搭載車両の速度計信号およびブレーキシステムに組み入れる。接近車両の接近率がその車両のロケーションと比較して極端に高いと判断される場合、眩しいストロボ信号がブレーキ信号とともに自動的に与えられる。ストロボ警告の強度は、車両が接近している速度および距離によって決定される。
(もっと読む)
メッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステム

【課題】空間認知過程で発生する情報歪曲現象を解消できるメッシュ型空間解析技法を利用した駐車空間探知方法及びそのシステムを提供する。
【解決手段】本発明は、所定の制御信号に応じて超音波信号を発信する送信部と、前記送信部から発信された信号が物体に突き当たって戻る反響信号を受信する受信部と、前記送信部により超音波が走査される駐車予定空間に対して仮想の領域を設定し、当該領域を所定間隔のセル(cell)で分割したメッシュ型空間イメージをデータに格納するメッシュ型空間設定部と、前記反響信号を解析して前記メッシュ型空間設定部により設定されたメッシュ型分割領域に対して非障害物領域を確定する非障害物領域判定部と、前記非障害物領域判定部により確定された非障害物領域を除外させ、最終的な空間分析結果を算出するコントローラとを含んでなることを特徴とする。
(もっと読む)
車両の道路形状予測装置及びこれを備えた車両の走行制御装置
【課題】車車間通信により検出された他車両の情報に基づいて、車両の進路前方における道路形状を予測することができるようにした、車両の道路形状予測装置、及び、これを備えた車両の走行制御装置を提供する。
【解決手段】
他車両判定手段18aにより他車両2が車両1の進路前方にいると判定された場合に、他車両情報取得手段10により取得された他車両2の車速情報及び他車両2の運転操作情報に基づいて、車両1の進路前方における道路形状を予測する道路形状予測手段18を備える。
(もっと読む)
車輛のサイドドア
【課題】MDB側突時におけるOFF要件での加速度レベルが上がることを抑制しつつ、ポール側突時におけるON要件での加速度レベルを上げる車輛のサイドドアの提供。
【解決手段】リインホースメント40の一部はドアアウタパネル10のドア下モール締結部14と車輛側面視にてラップする。該ラップ部分にリインホースメント40はポール側突時にクリップ68と当接するクリップ当接部50を有する。クリップ当接部50はMDB側突時にドアインナパネル側に変形するドアアウタパネル部分より下方に設定される。これによりOFF要件での加速度レベルを上げずにON要件での加速度レベルを上げることができる。リインホースメント40にはフランジ48が追加形成される。クリップ当接部50はフランジ48に形成されたビード52のクリップ対向壁か、またはフランジ48のドアアウタパネル側端部に追加形成された断面L型フランジ56の縦壁からなる。
(もっと読む)
車線監視システム及び車線監視方法
【課題】走行中の車線がカーブしている車線であるか否かを簡易な構成において判定可能な「車線監視システム及び車線監視方法」を提供する。
【解決手段】後方カメラ1で撮影した自動車後方の画像フレーム中の白線上の各位置における白線の方向の、自動車側方位置における白線の方向に対する方向差Δiを、自動車から当該白線上の位置までの、自動車側方位置における白線の方向の距離cxiと共に求める。複数の画像フレームについて求めたQi :(cxi, Δi)を合成し、各Qiを取る直線Δ=mx+uを近似的に求め、直線の傾きが大きい場合には、走行中の車線がカーブしている車線であると判定する。
(もっと読む)
障害物通知システムおよび障害物通知方法
【課題】車両の運転者に、障害物までの距離を直感的に伝えることができる障害物通知システムを提供する。
【解決手段】車両が有する座席の着座面の位置を変位させる機構と、自車両周辺の障害物と自車両との距離情報を取得する障害物検知手段と、前記取得された距離情報から、前記機構の駆動方法を決定する制御命令決定手段と、を有することを特徴とする。また、前記制御命令決定手段は、自車両と障害物との距離が近くなるに従って前記着座面の初期位置からの変位量を大きくし、もしくは、所定の時間ごとに前記着座面を動揺させる制御を行い、障害物との距離に応じて前記所定の時間を短くすることで、障害物との距離を運転者に伝達することが好ましい。また、前記制御命令決定手段は、障害物が位置する方向もしくは車両の進行方向に前記着座面を変位させる制御を行ってもよい。
(もっと読む)
走行支援装置
【課題】路側機が設置されていない交差点であっても、その交差点での走行を支援するための情報を提供する。
【解決手段】走行支援装置10は、擬似車両分布データ保有処理部22によって、交差点から所定範囲内の道路上に対応付けて設定された基準位置、及び、当該基準位置に対応付けて設定された基準進行方向を記憶し、自車両現在位置検出処理部23によって、自車両の現在位置を検出し、自車両進行方向検出処理部25によって、自車両の進行方向を検出し、自車両の現在位置が基準位置に近付き、かつ、自車両の進行方向が基準進行方向に近似している場合に、制御部11によって、交差点に関する運転支援を実行する。
(もっと読む)
画像生成装置
【課題】俯瞰画像に映し出された立体物の認識、特にその立体物の立ち位置を簡単に認識することができるモニタ表示画像を生成する画像生成装置の提供。
【解決手段】車両の周辺領域を撮影する車載カメラ1a,1b,1c,1dによって取得された撮影画像を上方仮想視点で射影変換することで俯瞰画像を生成する俯瞰画像生成部と、周辺領域に存在する立体物を認識して当該立体物の属性を示す立体物属性情報を出力する立体物検出部と、立体物属性情報に基づいて、立体物の接地位置を示す接地面マークを俯瞰画像における接地位置に画像合成することで、車両運転支援用のモニタ表示画像を生成する画像合成部と、
が備えられている。
(もっと読む)
衝突回避システム
【課題】後続車両の衝突を確実に防止することができる衝突回避システムを提供する。
【解決手段】 衝突する危険度が小さいものでなくなった場合(S23:NO)、後続車両が自車両に衝突する危険度を算出し(S40)、この危険度が大きくなった時に、自車両に対して先行する先行車両に回避方向及び回避距離に関する情報を送信して(S25、S30)、自車両だけでなく先行車両をも回避させて(S31、S67)、後続車両が自車両に追突することを防止している。このとき、自車両と先行車両で構成する車列の側方に回避スペースを形成するとともに、各車両の車間を詰めさせて、自車両の後方にも回避スペースを形成している。このため、自車両だけで回避制御を行っていた従来の衝突回避システムと比べ、この衝突回避システムを用いると、後続車両の衝突をより確実に防止することができる。
(もっと読む)
81 - 90 / 6,854
[ Back to top ]