
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
901 - 910 / 6,854
退出支援装置
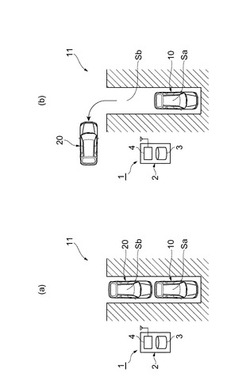
【課題】円滑な交通を確保することができる退出支援装置を提供する。
【解決手段】退出支援装置1は、自車両10の駐車場11からの出庫(退出)を支援するものであり、移動指令部4を有するキー2を備えている。移動指令部4は、他車両20に対して移動指令を送信して他車両20のアクチュエータを適宜動作させ、自動出し入れ機能を実施させる。つまり、退出支援装置1では、他車両20を駐車場11外へ退出させる退出移動指令と、自車両10及び他車両20が駐車場外へ退出した後に他車両20を駐車場11内に再駐車させる再駐車移動指令とが、キー2から他車両20に対して送信される。
(もっと読む)
運転支援装置

【課題】車両区画線の位置を適正に推定し、適正な運転支援情報を出力する。
【解決手段】車両に搭載され、運転者に対して運転支援情報を出力する運転支援装置であって、前記車両が走行する車線の右側及び左側に敷設されている車両区画線を検出する白線検出手段と、前記車両の位置情報、及び、地図情報に基づいて、前記車両が走行する道路が中央区分線の無い道路であるか否かを判定する車線判定手段と、前記車線判定手段によって中央区分線の無い道路であると判定された場合に、前記白線検出手段によって検出された車両区画線に基づいて、仮想的な中央区分線の位置を推定する中央線推定手段と、前記中央線推定手段によって推定された仮想的な中央区分線の位置に基づいて、前記運転支援情報を出力する情報出力手段と、を備える。
(もっと読む)
車種判別装置及び運転支援装置
【課題】簡単に、かつ低コストに、自車両の前方を走行する車両の種別判別を行うことができる種別判別装置を提供する。
【解決手段】本発明の種別判別装置によれば、車載カメラ11が自車両に搭載されており、当該車載カメラ11が走行中自車両の前方を走行している車両を撮影する。画像メモリ12に撮影した画像を記憶する。そして、画像処理手段13は、撮影した前方車両の特長部位の画像を構成する画素数を計測する。更に、車種判別手段14は、計測した画素数と予め定めた閾値とを比較し、前方車両の車種を判別する。
(もっと読む)
自動車を支援して車庫入れさせるための方法および装置
【課題】自動車を駐車余地に車庫入れさせるための方法および相応の装置を提供すること。
【解決手段】自動車1を駐車余地20に支援しながら車庫入れさせるための方法において、駐車余地20に向かって走り、自動車1に配置されているセンサを用いて駐車余地20を測量し、目標車庫入れパス21を計算しかつ該目標車庫入れパス21をディスプレイ15に指示し、実際車庫入れパス22をディスプレイ15に指示して、該実際車庫入れパス22が目標車庫入れパス21に整合できるようにするステップを有しており、駐車余地20を通過する際に、駐車余地20の延在方向に関する自動車1の初期偏揺角を予め定め、初期偏揺角の調整設定を電子的な制御ヘルプを用いて行う方法。
(もっと読む)
駐車支援装置
【課題】駐車支援に不慣れな運転者に対しても的確に支援が開始され、運転者がその支援内容を容易に理解することができる駐車支援装置を提供する。
【解決手段】撮影装置12により撮影された周辺画像を取得する画像取得部2と、少なくとも周辺画像を表示装置20に表示させる表示制御部3と、駐車目標位置に駐車する際に複数工程の各工程ごとに規定される運転操作を、文字及び図形の少なくともいずれかにより示す操作ガイドを生成する操作ガイド生成部4と、操作ガイドと対応し、操作ガイドよりも表示面積の小さい操作アイコンを生成する操作アイコン生成部5と、各工程において運転操作が行われない状態で予め設定した時間が経過すると、当該工程の操作ガイドを周辺画像に重畳表示させた状態とし、この状態から運転操作が開始されると、操作ガイドに代えて操作アイコンを重畳表示させた状態とする重畳制御部6と、を備えた。
(もっと読む)
車両用情報提供装置
【課題】道路状況に応じて適切なタイミングで情報提供を行う車両用情報提供装置を提供すること。
【解決手段】車両に搭載され、自車両進行方向前方に存在する運転者が注意を払うべき注意地点に関する情報を運転者に提供する車両用情報提供装置が、自車両進行方向前方に上記注意地点が検出されたとき、検出された当該注意地点から第一の所定距離手前の基準地点における道路状況に基づいて、当該注意地点に関する情報を運転者に提供するタイミングを変更する。A)基準地点がカーブ路上の場合にはカーブ路進入前に、B)基準地点がカーブ路手前の場合には基準地点から第二の所定距離手前の地点において、C)基準地点がカーブ路上でもカーブ路手前でもない場合には基準地点において、検出された注意地点に関する情報を運転者に提供する。
(もっと読む)
車両メンテナンス支援装置
【課題】車載機器のメンテナンスを容易に行うことができる車両メンテナンス支援装置を提供する。
【解決手段】車両メンテナンス支援装置1では、車両10が車庫に進入する際の進行方向がバッテリ格納部Bの位置に基づき規定され、車両10が車庫に進入する際の進行方向が検出され、規定された進行方向と検出された進行方向とが互いに相違する場合に車両10のドライバによる駐車操作が拒絶される。よって、バッテリ格納部Bが車両前方に位置されていると、規定する進行方向が車両後方とされ、後進駐車のみが許可されることとなる。その結果、駐車スペースの出入口側にバッテリ格納部Bが位置するよう車両を駐車できる。
(もっと読む)
車両情報の記録装置
【課題】車両の事故時の車両状況を正確に把握可能とするナビゲーションシステムを利用した車両情報の記録装置を提供する。
【解決手段】車両に関する情報を記録する事故記録制御部400が、レーダ800によって測距された車間距離が所定距離以下となった場合に、CCDカメラ500から取得した車両周囲の映像情報を記録する第1の記録処理と、衝突センサ700からの出力に基づき、CCDカメラ500から取得した車両周囲の映像情報を記録する第2の記録処理の2つの記録処理を含むように車両事故記録装置を構成する。
(もっと読む)
駐車支援システム
【課題】各種障害物を含む駐車支援用の画像提供を車両側の負担を極力少なくして行えるようにする。
【解決手段】駐車施設Tが、駐車施設T内の物体を検出するセンサ類19と、駐車スペース1を上方から撮像するカメラCと、カメラCで撮像された車両Vおよびその周囲の映像を含む駐車支援情報を生成する映像処理部12を有する。駐車支援用の画像が、映像処理部12から双方向通信によって車両Vに送信される。駐車支援用の画像は、センサ等19で検出された非定常物(例えば買物カートや人間)のデータを含むものとして生成される。
(もっと読む)
区画線検出装置
【課題】区画線を適切に検出する区画線検出装置を提供する。
【解決手段】画像処理ECUは、路面画像のデータを取得し(S10)、取得した路面画像に基づいてエッジ点を抽出する(S12)。次に、S12にて抽出されたエッジ点から縦方向に連続するエッジ点をノイズとして除去し(S14)、ハフ変換によってエッジ線の抽出を行う(S16)。次に、抽出したエッジ線に基づいて区画線位置の算出を行い(S18)、区画線の逸脱判定を行う(S20)。ここでは、ヨーレートおよび車両速度に基づいて予測した車両の走行軌跡と、S18にて算出した区画線の位置とから車両が区画線を逸脱するまでに要する時間を算出する。算出した時間が所定のしきい値以上であれば逸脱しないと判定し(S20:NO)、しきい値未満であれば逸脱の危険ありと判定し(S20:YES)、ブザー要求の制御信号を出力する(S22)。
(もっと読む)
901 - 910 / 6,854
[ Back to top ]