
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
961 - 970 / 6,854
安全運転の支援機能を備える車両用のナビゲーション装置
【課題】車両の安全運転の支援機能をより活用できるようにする。
【解決手段】ナビゲーション装置100は、入力手段14と、支援機能を表示する表示手段12と、支援機能を有効または無効とする設定をおこなうための設定情報と、当該設定を支援する設定支援情報とを格納するメモリ18と、表示手段に設定情報を表示させる際に、設定情報に対する入力手段を介した入力に応じて、設定支援情報を表示手段に表示させる制御手段10と、を備える。
(もっと読む)
人物検出装置、人物検出プログラム、作動制御装置、および衝突緩和装置

【課題】対象物が人物であるか否かを精度よく識別できるようにする技術を提供する。
【解決手段】衝突緩和装置は作動判定処理において、画像センサから取得した画像に基づいて検出された対象物の外観に関するパラメータと人物に関する比較用パラメータとが一致する度合いに応じて、対象物が人物である確率を表す人物確率を演算し(S210:S310〜S330)、人物確率が予め設定された人物閾値以上である場合に対象物が人物であると判定する(S230)。ただし、対象物を検出する際の検出環境に対応する人物の存在確率に応じた補正値を利用して、人物閾値を補正する(S220)。この補正の際には、人物の存在確率が高くなるにつれて対象物が人物であると判定されやすくなるようする。
(もっと読む)
歩行者衝突検出装置
【課題】圧力チャンバ(を備えたチャンバ部材)を用いて歩行者と衝突したことを検知する構成において検出精度を向上させることができる歩行者衝突検出装置を得る。
【解決手段】衝突判定システムは、車両幅方向を長手方向として配置されかつ内部が圧力チャンバ22とされたチャンバ部材20を備えている。チャンバ部材20はバンパリインフォースメント14の前面14Aに隣接して配置されている。バンパカバーとバンパリインフォースメント14との間にはバンパアブソーバ28が配設されている。バンパアブソーバ28は下部に配置される本体部30と、チャンバ部材20とバンパカバーとの隙間に配設される隙詰め部32とで構成されている。さらに、隙詰め部32におけるチャンバ部材20との対向面には凹凸部46が形成されており、歩行者の脚部が侵入すると、2個の凸部42でチャンバ部材20を押圧するようになっている。
(もっと読む)
車両
【課題】通知システム及び減速支援システムの両方を運転者の期待通りに作動させる。
【解決手段】車両(1)は、所定の通知条件が成立したことを条件に、信号機の灯色が赤である期間の残り時間を通知する通知システム(10)と、所定の減速支援条件が成立したことを条件に、車速が低下するように所定の減速制御を行う減速支援システム(20)と、を備える。車両は、所定の減速支援条件が成立した場合に、所定の通知条件を緩和する条件緩和手段(109)を備える。
(もっと読む)
車載情報蓄積装置
【課題】 カメラ映像記録制御を、車両周辺監視装置から得られる周辺車両との車間距離や相対速度差といった情報と予め定められたそれぞれの基準値との比較に基づき判定される危険性(危険あり/危険なし)という物理的な事象から求められる判定結果で一意的行っているため、場面や状況によってはユーザにとって不必要な情報までを記録してしまう、という問題があった。
【解決手段】 本発明によれば、車両自体の複数の場面や状況を判断する場面・状況判断手段と、前記場面・状況判断手段によって判断された前記複数の場面・状況を前記所定の条件として、前記データ記録領域に記録させるデータの種類を前記データ記録手段に対して指定する取得データ切り替え手段を備えたものである。
(もっと読む)
車両の後側方警報装置
【課題】自車両1の横方向変位に伴う後側方警報エリア14,15のずれによって他車両18の検出精度が低下することを防止する。
【解決手段】自車両1の位置を基準として後側方警報エリア14,15を設定し、該後側方警報エリア14,15内に他車両18が検出されたときに警報を出すようにした車両の後側方警報装置に、走行中の車線幅員Wにおける自車両位置を検出する自車両位置検出手段と、車線幅員Wにおける自車両位置に応じて後側方警報エリア14,15を横方向に変更する警報エリア変更手段とを設ける。
(もっと読む)
駐車支援装置
【課題】車両を後退させて駐車する際に適切な駐車支援を行うことができる駐車支援装置を提供する。
【解決手段】 駐車支援装置のECUは、GPSにより検出された車両位置座標と地磁気センサにより検出された車両前後方位とを読み込み、これらの車両位置座標及び車両前後方位に基づいて車両前後方向と車両進行方向との角度差δを算出する。そして、ECUは、角度差δの絶対値が所定差分閾値A2よりも大きいときは、ガイド線表示フラグをOFFにし、角度差δの絶対値が所定差分閾値A1以上であり且つ所定差分閾値A2以下であるときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをONにし、角度差δの絶対値が所定差分閾値A1よりも小さいときは、ガイド線表示フラグをONにすると共にガイド線補正フラグをOFFにする。
(もっと読む)
輸送手段の安全な運転を補助する装置及び方法
【課題】輸送手段の安全性を改善する装置及び方法を提供すること。
【解決手段】輸送手段の安全運転を補助する装置は,輸送手段環境内の危険事情を検出する環境感知器システムと,(視線軌跡のような)ドライバ認知データを提供するドライバ監視器と,危険事情データと視線軌跡とを比較することによって,ドライバが十分に又は不十分に感知した危険事情を特定する注意評価モジュールとを含む。認知していない危険事情に関係する警告信号を提供することができる。
(もっと読む)
走行支援装置および走行支援方法
【課題】車両が通過する予定の領域を精度良く、且つ、容易に設定して、その領域に物体が存在するか否かを判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域は、車両1が実際に走行する走行領域F1の一部となるので、障害物判定領域Eを全て足し合わせた領域F3を、車両1の走行領域とみなすことができる。従って、車両1が実際に走行する領域F2を算出しなくても、走行経路RT1〜RT3に対応する走行領域を精度良く、且つ、容易に設定でき、その走行経路RT1〜RT3に対応する走行経路内に、障害物が有るか否かを判定できる。
(もっと読む)
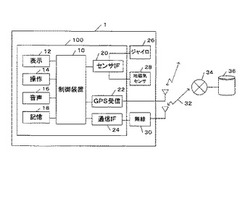
車両接近警告システム、携帯警告端末、および車載通信機
【課題】車両が人に接近したときに、それを聴覚刺激以外の方法で人に警告できる技術を提供する。
【解決手段】携帯警告端末4は、車載通信機5から無線送信された車両走行データを受信すると、車両走行データの受信時における電界強度が閾値Pよりも大きく、かつ、車両走行データの受信時における受信電界強度の変化率が、所定の閾値Qよりも高い場合に、歩行者2に対して、振動で車両接近の警告を行う。
(もっと読む)
961 - 970 / 6,854
[ Back to top ]