
国際特許分類[B60R21/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 他に分類されない車両,車両付属具,または車両部品 (56,583) | 事故又は他の交通危機の場合乗員又は歩行者を負傷から保護又は防止するための車両の装置又は部品 (17,052)
国際特許分類[B60R21/00]の下位に属する分類
交通事故又は差し迫った交通事故の場合における安全装置の始動のための電気回路 (777)
乗員安全装置又は部品 (8,486)
車両の非乗員,例.歩行者の保護[4,2011.01] (935)
国際特許分類[B60R21/00]に分類される特許
971 - 980 / 6,854
走行支援装置および走行支援方法
【課題】車両が通過する予定の領域を精度良く、且つ、容易に設定して、その領域に物体が存在するか否かを判定できる走行支援装置および走行支援方法を提供すること。
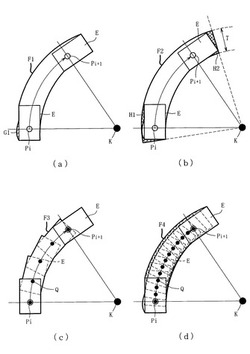
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域は、車両1が実際に走行する走行領域F1の一部となるので、障害物判定領域Eを全て足し合わせた領域F3を、車両1の走行領域とみなすことができる。従って、車両1が実際に走行する領域F2を算出しなくても、走行経路RT1〜RT3に対応する走行領域を精度良く、且つ、容易に設定でき、その走行経路RT1〜RT3に対応する走行経路内に、障害物が有るか否かを判定できる。
(もっと読む)
車両接近警告システム、携帯警告端末、および車載通信機

【課題】車両が人に接近したときに、それを聴覚刺激以外の方法で人に警告できる技術を提供する。
【解決手段】携帯警告端末4は、車載通信機5から無線送信された車両走行データを受信すると、車両走行データの受信時における電界強度が閾値Pよりも大きく、かつ、車両走行データの受信時における受信電界強度の変化率が、所定の閾値Qよりも高い場合に、歩行者2に対して、振動で車両接近の警告を行う。
(もっと読む)
携帯端末および安全運転支援システム
【課題】車道を横断しようとしている歩行者を予測して車両に事前に通知する手段を提供する。
【解決手段】歩行者が所持する携帯端末2に、車両に搭載された車々間通信装置1への送信を行う送信部23と、所持者による目的地の入力を受付ける入力部26と、歩行時の加速度を検出する加速度センサ29と、位置測定のための位置情報を受信するGPS受信部28とを設け、GPS受信部28により受信した位置情報を基に、所持者の現在位置を認識し、認識した所持者の現在位置から目的地までの間に設定した移動経路によって、所持者の歩行行動を制限し、加速度センサ29からの歩行時の加速度のピッチ間隔の変化によって横断前の準備行動を検出し、準備行動を検出したときに、所持者の現在位置から進行方向前方の移動経路の形状に基づいて、所持者が車道を横断するか否かを予測し、所持者による横断を予測したときに、送信部23によって車々間通信装置1へ、横断可能性を有する歩行者の存在を通知する。
(もっと読む)
走行支援装置および走行支援方法
【課題】走行支援する経路上に物体があるかを少ない処理コストで判定できる走行支援装置および走行支援方法を提供すること。
【解決手段】走行制御点Qは、走行経路RT1〜RT3上に仮想的に設けられた点であるので、その走行制御点Qにおける障害物判定領域Eは、実際の走行領域F1の一部である。よって、各走行制御点Qにおける障害物判定領域Eを全て足し合わせた領域を、車両1の走行領域とみなすことができるので、各走行制御点Qごとに、その車両1の障害物判定領域E内に障害物が存在するか否かを判定することで、走行経路RT1〜RT3上に障害物が存在するか否かを判定できる。従って、車両1が実際に走行する走行領域F1を算出しなくて済むので、複雑な領域の計算を行わなくて良く、処理コストを抑制できる。その結果、走行支援する経路上に障害物があるかを少ない処理コストで判定できる。
(もっと読む)
衝突予測装置
【課題】低コストで精度の高い衝突予測を可能とする衝突予測装置を提供する。
【解決手段】車両に搭載され、当該車両と障害物との衝突を予測する衝突予測装置であって、車両の周囲に電磁波を送信し、障害物から反射された当該電磁波の反射波を受信することによって当該障害物を検出する障害物検出手段と、障害物が検出された場合、車両と障害物との衝突の危険性が高いか否かを判定する衝突判定手段と、高さの異なるフロアを往来するためのスロープを備えた建築造成物内において当該スロープ上を車両が走行している可能性が高いか否かを判定するスロープ走行判定手段と、車両がスロープを走行している可能性が高いと判定された場合、衝突判定手段の判定感度を車両がスロープを走行している可能性が高いと判定されていない場合に比べて低減する感度変更手段とを備える、衝突予測装置。
(もっと読む)
記録システム
【課題】事故データの収集精度が向上する記録システムを提供する。
【解決手段】本発明の記録システムは、車両に搭載されると共に、少なくとも車両周辺の画像情報を記録するレコーダー装置700を複数含む記録システムであって、自車両の衝突可能性を算出する衝突可能性算出手段(ECU100)と、前記衝突可能性算出手段によって算出された衝突可能性が所定値以上であるかを判定する判定手段(ECU100)と、自車両から基準距離内に存在する他車両に搭載されるレコーダー装置700のID情報を取得するID情報取得手段(ECU100など)と、前記判定手段(ECU100)による判定結果に基づいて、前記ID情報取得手段(ECU100など)によって取得されたIDのレコーダー装置700に対して、記録保存要求を送信する通信部500と、を有することを特徴とする。
(もっと読む)
運転記録装置および地図作成システム
【課題】ヒヤリハット事例が発生した場合の対象や事象を解析するための情報を取得することが可能な運転記録装置およびヒヤリハット地図を作成する地図作成システムを提供する。
【解決手段】時系列の画像データから2次元オプティカルフローを算出する3次元計測部1と、2次元オプティカルフローに基づいて、自車両との接触の可能性のある画像内の領域を障害物判定候補領域として検出する障害物検出部2と、障害物判定候補領域に対して、距離情報に基づいて、自車両と障害物判定候補領域に写し出されている物体とが衝突するか否かを判定し、衝突までの時間が、回避可能時間に比較して余裕がない場合にはトリガ信号を発する衝突可能性判定部3と、トリガ信号のタイミングで、画像データを記録する記録部4と、画像データが記録された時点での位置情報を記録部4に与える位置情報取得部5とを備えている。
(もっと読む)
運転アシストシステム
【課題】より広範な視点からの予測に基づいて、衝突回避などのための的確な運転アシスト動作を行う。
【解決手段】車両に搭載され車両の運転をアシストする運転アシスト装置700を複数含む運転アシストシステムであって、自車両周辺に存在する他車両の画像データを取得するステレオカメラユニット420と、他車両の運転アシスト装置700のID情報を取得するID情報取得手段と、前記ステレオカメラユニット420によって取得された画像データに基づいて、他車両が衝突する可能性を算出する衝突可能性算出手段と、前記衝突可能性算出手段によって算出された衝突可能性が所定値以上である車両が搭載する運転アシスト装置700のID情報を抽出するID抽出手段と、前記ID抽出手段によって抽出されたID情報の運転アシスト装置700に対して、運転アシスト動作要求を行う。
(もっと読む)
走行支援装置
【課題】自車両が走行車線を離れる際に警報を行うことで安全走行を支援する走行支援装置において、車線変更時の安全性を向上させること。
【解決手段】後続車両が存在するか否かを判定する(S110)。後続車両が存在すると判定された場合には(S110:YES)、運転者に車線変更の意図があるか否かを判定する(S120)。具体的には、ドライバ操作判定部が、ステアリングセンサから入力された自車両のステアリングホイールの操作状態からステアリングホイール操作の有無を判定する。運転者に車線変更の意図があると判定された場合には(S120:YES)、自動ウインカをONに設定するとともに警報ACTによる報知警報をONに設定する(S130)。なお、自動ウインカがONに設定されると作動機能調停部が自動ウインカを作動させ、警報ACTによる報知警報がONに設定されると作動機能調停部が警報ACTを作動させる。
(もっと読む)
車両の運転支援装置
【課題】低コストで且つ利便性の高い車両の運転支援装置を提供する。
【解決手段】車両に搭載され、水平方向の一部に撮像範囲の重複領域が存在するように、異なる向きに配置された少なくとも1対の撮像手段1,2と、撮像手段1,2の出力画像信号の処理を行う画像信号処理手段10とを備え、画像信号処理手段10が、1対の撮像手段1,2より取り込まれた2つの出力画像信号から重複領域内の対象物をそれぞれ検出する対象物検出部14と、2つの出力画像信号を用いて、対象物検出部14で検出された対象物に対する車両からの距離を算出する距離算出部15と、撮像手段1,2から取り込まれた出力画像信号を合成して俯瞰画像を生成する俯瞰画像生成部13とを有する。
(もっと読む)
971 - 980 / 6,854
[ Back to top ]