
国際特許分類[B60T8/171]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
国際特許分類[B60T8/171]に分類される特許
71 - 80 / 161
加速度演算装置および電気式動力舵取装置
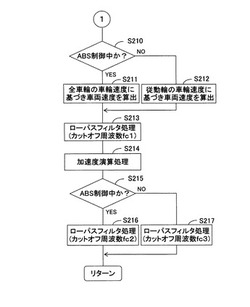
【課題】加速度センサを用いることなく車両の前後方向の加速度を正確に演算し得る加速度演算装置および電気式動力舵取装置を提供する。
【解決手段】駆動輪である右前輪FR、左前輪FLの各原車輪速度を検出する車輪速度センサFRs、FLsと、従動輪である右後輪RR、左後輪RLの各原車輪速度を検出する車輪速度センサRRs、RLsとを備えて、ABS制御中であると判定された場合、全ての車輪(FR、FL、RR、RL)の各車輪速度(規制後車輪速度V1fr、V1fl、V1rr、V1rl)のうちの最大速度の車輪速度に基づき車両速度Vspdを演算し、ABS制御中でないと判定された場合、従動輪(RR、RL)の各車輪速度(規制後車輪速度V1rr、V1rl)のうちの最大速度の車輪速度に基づき車両速度Vspdを演算する。そして、このように演算される車両速度Vspdに基づき車両の前後加速度Gsを演算する。
(もっと読む)
走行制御装置

【課題】複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる走行制御装置を提供する。
【解決手段】ナビゲーションシステム12、前方ミリ波レーダ30、近距離ミリ波レーダ32、前方画像センサ40及び後方/側方/周辺画像センサ42の複数のセンサ類を備え、LKA部221、ACC部222、PCS部241の複数の走行制御システムを備えた走行支援システム1において、センサの優先順位は走行制御の全てについて固定されているのではなく、走行制御の種別それぞれに対応して優先順位が設定され、LKA部221等のそれぞれは優先順位に従ってセンサ類それぞれの検出結果を適用して車両を制御するため、複数種類の車両走行制御それぞれに対応した検出結果に基づいて走行制御を行うことができる。
(もっと読む)
車輪情報取得装置および車両制御装置
【課題】車輪に作用する加速度情報から得られる情報を精度よく取得可能とする。
【解決手段】車輪側装置は、車輪14の加速度を検出する加速度センサ68と、その加速度センサ68による検出情報を含む車輪情報を送信可能なTPMS送信機とを収容したケース62を有し、そのケース62が車輪14を構成するタイヤ30とホイール50との間に形成された内部空間Sに配置される。車体側装置は、TPMS送信機から送信された車輪情報を受信する受信部と、車輪14の回転に伴う遠心力によるケース62の変位量を推定する変位量推定部と、受信された車輪情報に含まれる加速度情報から得られる横力をケース62の変位量に基づいて補正する補正部とを有する。
(もっと読む)
車両制御装置
【課題】走行中におけるパーキングブレーキの制動時に車両の操縦安定性を確保できる車両制御装置を提供する。
【解決手段】車両制御装置を、車両の挙動に応じて車両の一部の車輪を制動してヨーモーメントを発生させるヨーモーメント制御手段100と、ヨーモーメント制御手段100の作動スタンバイ状態と非作動状態とを選択する選択手段170と、走行中におけるパーキングブレーキ装置10の制動を検出する動的制動検出手段110とを備え、ヨーモーメント制御手段100は、非作動状態での走行中におけるパーキングブレーキ装置10の制動の検出に応じて、非作動状態から作動スタンバイ状態へ変更する構成とする。
(もっと読む)
車両制御装置
【課題】回転半径短縮制御が作動した場合に車輪速センサの異常判定における誤判定を抑制する車両制御装置を提供することを課題とする。
【解決手段】車両の旋回性能を向上させるために左右輪の駆動力差により旋回制御を行う車両制御装置1において、旋回制御がされるときは車輪速センサ10,11,12,13の異常判定において異常と判定され難くする(例えば、旋回制御がされるときは左右輪の駆動力差が大きいほど車輪速センサの異常判定閾値を異常と判定され難くなる値に変更する、旋回制御がされるときは車輪速センサの異常判定を停止する)ことを特徴とする。
(もっと読む)
車輪回転センサの取付構造
【課題】センサロータに対して車輪回転センサを位置決めする作業性がよく、且つ、コンパクトに構成することができる車輪回転センサの取付構造の提供。
【解決手段】車輪回転センサ40の取付構造は、ブレーキフランジ20とブラケット30と車輪回転センサ40とを備える。ブレーキフランジ20は、車輪の回転軸に対して固定されるセンサロータ10の近傍に配置され、回転軸と交叉するフランジ面21を有し、車体側に固定される。また、ブレーキフランジ20のフランジ面21からは、ボス部25が一体的に突出する。ブラケット30は、ボス部26の先端部27に接触した状態でブレーキフランジ20に固定される。車輪回転センサ40は、ブラケット30に固定され、センサロータ10の回転軌跡と対向し、センサロータ10を回転軸と略平行な方向から検出する。
(もっと読む)
自動二輪車の車輪速センサ取付構造
【課題】車輪速センサの外側を覆うカバーを設けなくても、車輪速センサのセット状態を維持することができる自動二輪車の車輪速センサ取付構造を提供する。
【解決手段】フロントフォーク3の下部に前輪6を支持するアクスルフォルダー4を設け、そのアクスルフォルダー4の下方にアクスル支持部20、後方にディスクブレーキのブレーキキャリパを取り付けるキャリパーマウント部30を備え、そのキャリパーマウント部30に車輪速センサ10を取り付けた自動二輪車の車輪速センサ取付構造において、アクスル支持部20の下端部20aとキャリパーマウント部30の下端部30aとを結ぶ線40より上方に車輪速センサ10を取り付けた。
(もっと読む)
ペダル誤操作防止装置
【課題】アクセルペダルとブレーキペダルを両方踏んでしまうことがある。
【解決手段】アクセルペダル30、ブレーキペダル40は、車両のドライバーによって踏まれる踏面32、42を有する。踏面の下側には、踏面の略全体にかけられる圧力を検出可能な面圧センサ34、44が配置される。制御部100は、ブレーキペダル40の面圧センサ44において圧力がかかっている部分の踏面全体に対する割合を計算し、その割合が予め定められたしきい値以上であるとき、ブレーキ操作がドライバーによって意図されていると判定する。この判定結果に応じて、車両のエンジン制御ECUに対してスロットルオフ信号が発せられる。
(もっと読む)
車両の制御量設定装置
【課題】車両が長期にわたって使用されても、車両の運動制御を好適に実行させることができる車両の制御量設定装置を提供する。
【解決手段】制御量設定装置11を構成するECU16は、車両状態を数値的に表す車両状態値としてヨーレート偏差を検出する。また、ECU16は、車両の走行距離を車両特性値として読み出し、該走行距離が走行距離閾値よりも大きいか否かを判定する。そして、走行距離が走行距離閾値以下である場合、ECU16は、車両特性が未だ変化していないものと判断し、走行距離を加味することなく、ヨーレート偏差のみに基づき制御量を設定する。一方、走行距離が走行距離閾値よりも大きい場合、ECU16は、車両特性が変化してしまったものと判断し、ヨーレート偏差と走行距離とに基づき制御量を設定する。
(もっと読む)
動作モードに対する切換えを有するアクティブセンサ
【解決手段】特別な動作モードに切換えるためのアクティブセンサ(1)であって、このセンサ(1)は、少なくとも1つのセンサ素子(2)と、1つの評価回路(3)と、センサ情報を伝送するための端子(41、51)を備えた2つの接続線(4、5)とを有し、このセンサ(1)の供給電圧は、これらの2つの接続線に印加され、このセンサ(1)は、2つの端子に印加される供給電圧の極性を反転することによって、正常動作モードと特別動作モードとの間を切換える使用することが可能である切換えモジュール(6)を有する。
この発明は、さらに、自動車両において、センサ(1)、特には車輪回転速度センサとして、アクティブセンサを作動するための方法、および、そのセンサ1の使用に関する。
(もっと読む)
71 - 80 / 161
[ Back to top ]