
国際特許分類[B60T8/171]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | この調整で使用されるパラメータを検知するもの;この調整で使用される値を測定するもの (161)
国際特許分類[B60T8/171]に分類される特許
81 - 90 / 161
車両運動制御装置
【課題】車両に対する障害物を事前に判断し、様々な走行情報を加味して回避走行全般に亘り、ドライバの操作、意志を的確に反映して自然に各車両挙動の制御装置が適切に動作し、障害物の回避走行を適切に行う。
【解決手段】路面摩擦係数、路面勾配の路面情報、自車両と障害物の相対的な運動を考慮し自車両が制動操作のみで障害物を回避できるか判定し、自車両の障害物に対する回避操作の状態を判定する。そして、自車両の制動操作のみで障害物を回避できない場合で且つ自車両の障害物に対する回避操作が行われている際、ハンドル操作と車両挙動に応じ回避走行モードに移行する。回避走行モード中はハンドル操作と車両挙動の変化に応じ必要な制御を車両挙動制御部に実行させ、回避走行モードの解除はドライバのハンドル操作による回避走行終了を検出し、或いは、障害物回避後の車両挙動の安定を検出し行う。
(もっと読む)
車両用センサ付き転がり軸受装置

【課題】 自動車のブレーキ操作時に、最大制動力を利用した制御を可能とする車両用センサ付き転がり軸受装置を提供する。
【解決手段】 センサ装置2は、超音波センサと、超音波センサの出力に基づいてタイヤ接地荷重の前後方向成分を求める前後荷重演算手段32と、タイヤ接地荷重の前後方向成分に基づいて車輪に与えるべきブレーキ力を演算するブレーキ力演算手段34とを備えている。ブレーキ力演算手段34は、タイヤ接地荷重の前後方向成分の変化量を求める前後力変化量演算部35と、タイヤ接地荷重の前後方向成分の変化量に所定係数をかけることによりブレーキ力制御のための信号を作成する信号作成部36とを有している。
(もっと読む)
センサ付車輪用軸受
【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を感度良く検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させ、車体に対して車輪を回転自在に支持する車輪用軸受において、前記外方部材1および内方部材2のうちの固定側部材にセンサユニット21を取付ける。例えば、固定側部材が外方部材1とする。センサユニット21は、センサ取付部材22およびこのセンサ取付部材22に取付けた少なくとも1つ以上の歪みセンサ23からなる。外方部材1は、ナックル16と接触するナックル接触部1aの一部に切欠き部17を有する。
(もっと読む)
ブレーキ力検出装置
【課題】 センサ出力のゼロ点補正が容易で検出出力の安定化を図ることが可能なブレーキ力検出装置を提供することである。
【解決手段】 キャリパブラケットの歪を検出するブレーキ力検出装置であって、キャリパブラケットは車輪支持体に固定される2箇所の固定部と固定部間を連結する連結部を有しており、キャリパブラケットの連結部には固定部を結ぶ線よりもブレーキディスクの半径方向外側に切欠部が形成されている。この切欠部中には連結部に生じる引張方向の変形を受けるように連結部と係合関係でセンサプレートが圧入されている。センサプレートには歪ゲージが貼付されている。
(もっと読む)
センサ付車輪用軸受
【課題】 車両にコンパクトに荷重検出用のセンサを設置できて、車輪にかかる荷重を感度良く検出でき、量産時のコストが安価となるセンサ付車輪用軸受を提供する。
【解決手段】 外方部材1と内方部材2の間に複列の転動体3を介在させ、車体に対して車輪を回転自在に支持する車輪用軸受において、前記外方部材1および内方部材2のうちの固定側部材にセンサユニット21を取付ける。例えば、固定側部材が外方部材1とする。センサユニット21は、センサ取付部材22およびこのセンサ取付部材22に取付けた少なくとも1つ以上の歪みセンサ23からなる。センサ取付部材22は、外方部材1に固定するための2箇所の接触固定部22a,22bを有する。第1の接触固定部22aは車体の懸架装置16に固定する。第2の接触固定部22bは、外方部材1の周面に固定する。
(もっと読む)
車両ブレーキ装置
【課題】複数の圧力センサを、既存の部品収納スペースを必要以上に拡張することなく設け、しかも、組み立て作業を容易にし、誤組み付けを極力防止できるようにする。
【解決手段】油圧ユニット101には、圧力センサユニット102が取着されており、当該圧力センサユニット102は、油圧ユニット101内の複数箇所におけるブレーキ液圧を検出する複数の圧力センサ21a〜21dと、これら圧力センサ21a〜21dの出力信号を、外部の回路へ出力するための電気的処理を行う電子回路が形成された回路基板41とがユニットハウジング42に収納されており、部品収納スペースの削減、組み立ての容易化等が図られたものとなっている。
(もっと読む)
車両挙動制御装置
【課題】 車両が連続走行している場合であってヨーレートセンサの零点補正を可能にすると共に、その零点補正の補正精度も高くすることを可能とする車両挙動制御装置を提供すること。
【解決手段】 この車両挙動制御装置CDは、停止中零点補正値と、走行中零点補正値との差分値に応じて、挙動制御を開始する制御開始閾値を設定する閾値設定部1bと、ヨーレートセンサの出力値が制御開始閾値を超えた場合に、車両の挙動制御を行う挙動制御部1cと、停止中零点補正値及び走行中零点補正値を算出する補正値算出部1aと、を備え、補正値算出1aは、ヨーレートセンサの電源が投入されてから第1の時間が経過した後、更に第2の時間が経過する間において車両が停止状態にある場合に、第2の時間におけるヨーレートセンサの出力値の平均値を停止中零点補正値又は走行中零点補正値として算出する。
(もっと読む)
加速度推定装置および車両
【課題】車両の進行方向の加速度を高精度で推定することができる加速度推定装置およびそれを備えた車両を提供することである。
【解決手段】等速用カルマンフィルタ330は、自動二輪車100の停止時および等速走行時にx方向加速度オフセットおよびz方向加速度オフセットを推定する。オフセット補正部360は、加速時および減速時にx方向加速度オフセット推定値およびz方向加速度オフセット推定値に基づいてx方向加速度およびz方向加速度を補正する。加減速用カルマンフィルタ340は、加速時および減速時に車輪速度、補正されたx方向加速度およびz方向加速度に基づいて車体1のピッチ角を推定する。加速度補正部370は推定されたピッチ角、補正されたx方向加速度およびz方向加速度に基づいてX方向加速度およびZ方向加速度を得る。車速演算部380はX方向加速度の時間積分によりX方向速度を算出する。
(もっと読む)
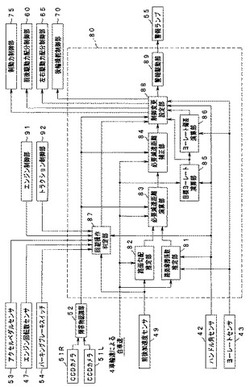
車両用ブレーキ制御装置
【課題】エンジンの回転に関する情報を取得せずに簡単な構成で車輪速度センサが異常であるか否かを判定する。
【解決手段】後輪用車輪速度センサ31の異常の有無を判定する異常判定手段21Aは、取得した車輪速度VF,VRが、所与の速度より低い状態であるときの時間を計測する計時部26と、エンストを生じてから停車するまでの時間より長い基準時間が予め設定された記憶部21aと、計時部26により計測された時間が基準時間を超えているか否かを判定し、超えた場合に後輪用車輪速度センサ31が異常であると判定する判定部28とを備える。
(もっと読む)
車高検知装置
【課題】車両への設置を容易にする。
【解決手段】車輪側発信部10は、車両50においてバネ下となる車輪51の側に配置され、所定の発信タイミングで定期的に波動信号を発信する。車体側受信部11は、車両においてバネ上となる車体52の側に配置され、車輪側発信部10から発信された波動信号を受信する。車体側受信部11では、波動信号が車輪側発信部10から発信されてから車体側受信部11にて受信されるまでの発受信時間や、車体側受信部11における波動信号の受信強度に基づき、車両50における車高を検知する処理を実行する。
(もっと読む)
81 - 90 / 161
[ Back to top ]