
国際特許分類[B60T8/175]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 車両用制動制御方式またはそれらの部品;制動制御方式またはそれらの部品一般;車両への制動要素の構成一般;車両が不意に動くのを阻止するためのもち運びできる装置;制動装置の冷却を助長するための車両の改造 (12,974) | 車両の状態または路面状況の変化に適合するための車輪制動力の調整装置,例.制動力の配分を制限または変更するための装置 (5,901) | ブレーキを制御するために電気調整手段または電子調整手段を用いるもの (3,677) | 車両の加速時の過度な車輪回転の防止に特に適したブレーキ調整,例.トラクション制御のためのもの (131)
国際特許分類[B60T8/175]に分類される特許
1 - 10 / 131
車体挙動安定化装置
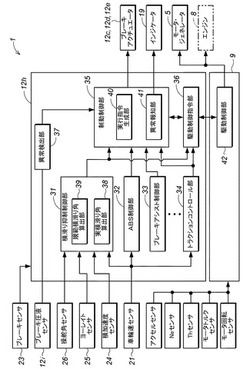
【課題】制動制御装置および駆動制御装置を用いた車体挙動安定化装置において、車体挙動安定化制御用のアクチュエータが異常となったときに車体挙動を安定化させる。
【解決手段】モータ・ジェネレータ5および/またはエンジン8の駆動力を制御することで第1の車体挙動安定化制御を実行する駆動制御指令部36と、ブレーキアクチュエータ12c〜12fを駆動制御して前後左右の車輪2・3の制動力を独立制御することで第2の車体挙動安定化制御を実行する制動制御部35と、ブレーキアクチュエータの異常を検出する異常検出部37とを備えた車体挙動安定化装置1において、異常検出部37がブレーキアクチュエータの異常を検出した場合、制動制御部35が2の車体挙動安定化制御を停止するとともに、駆動制御指令部36に対して車体挙動安定化制御の実行指令を出力し、駆動制御指令部36が単独で第1の車体挙動安定化制御を実行するようにする。
(もっと読む)
車両およびその制御方法

【課題】TCS制御を行い、駆動ホイールのスリップ量が設定数値以下に落ちてTCS制御を終了する時点で、モータの出力トルクが急に増加して発生する駆動ホイールのスリップと駆動系の振動を減少させることができる車両およびその制御方法を提供する。
【解決手段】本発明の車両は、駆動ホイールへのトルク伝達用モータを制御するモータ制御器、および前記駆動ホイールが地面とスリップすると判断される場合には、TSC制御を行い、前記駆動ホイールに伝達される回転力を減少させ、前記駆動ホイールが地面とスリップしないようにし、スリップが発生しないと判断される場合には、TCS制御を解除し、前記モータから前記駆動ホイールに伝達されるモータトルクを設定されたラインを沿って徐々に増加させるTCS制御器、を含むことを特徴とする。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う時定数可変の可変フィルタ処理部814と、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809と、建設車両の変速機の状態を判定する変速状態判定部808とを備え、時定数変更部809は、変速状態判定部808で変速機が変速中であると判定されると、可変フィルタ処理部814の時定数を現在よりも大きくする変速状態時定数変更部812を備える。
(もっと読む)
車両速度推定装置及びトラクションコントロール装置
【課題】全輪駆動の建設車両が走行する路面状況が動的に変化する状況にあっても、高精度に車両速度を推定することのできる車両速度推定装置を提供すること。
【解決手段】車両速度推定装置は、回転速度検出手段で検出された各車輪の回転速度のうち、最も小さい回転速度を選択し、前記建設車両の参照車輪速度を所定の時間毎に算出する手段801を備え、手段801は、最も小さい回転速度に低域濾波フィルタ処理を行う可変フィルタ処理部814、建設車両の走行状態に応じて、可変フィルタ処理部814の時定数を変更する時定数変更部809、建設車両の変速機の状態を判定する変速状態判定部808を備え、時定数変更部809は、ロックアップの解除指令が出力されてから一定時間経過していない状態にあると判定されたら、可変フィルタ処理部814の時定数を変更するロックアップ切換時定数変更部813を備える。
(もっと読む)
駆動力伝達装置
【課題】装置を小型軽量化できると共に応答遅れを極めて少なくでき、さらに前輪または後輪のスリップ時のトラクションを向上できる駆動力伝達装置を提供すること。
【解決手段】駆動源5の駆動トルクは中央差動制限装置7から前部差動装置4及び後部差動装置10に分配され、前部差動装置4及び後部差動装置10に分配された駆動力は、前輪2FL,2FR及び後輪2RL,2RRに分配される。前部差動装置4及び後部差動装置10の少なくとも一方と、中央差動制限装置7とはトルク感応式の差動制限装置で構成されているので、装置を小型軽量化できる。また、車輪2のスリップ時には、スリップした車輪2の駆動力が、トルク感応式の中央差動制限装置7により前輪2FL,2FR又は後輪2RL,2RRに増幅して非差動で分配される。その結果、スリップ時のトラクションを向上できると共に、時間的な応答遅れを極めて少なくできる。
(もっと読む)
トラクションコントロール装置
【課題】車両速度の推定にあたり、実際の車両速度との誤差が生じた場合であっても、適切に制御することができるトラクションコントロール装置を提供すること。
【解決手段】車両速度推定装置及び駆動力制御装置を備えたトラクションコントロール装置は、駆動力制御装置を構成し、回転速度検出手段で検出された回転速度から各車輪のスリップ率を算出して、算出されたスリップ率が一定の目標値に収束するように、制動機構の制御を行う制動機構制御手段84と、車両速度推定装置で推定された建設車両の車両速度、及び、制動機構制御手段84で算出されたスリップ率に基づいて、駆動力制御装置による駆動力制御のバランス状態の適否を判定する車両状態判定手段815と、バランス状態が不適であると判定されたら、駆動力制御装置による駆動力制御の状態を変更する駆動力制御変更手段816とを備えている。
(もっと読む)
車両の状態量計測用制御システム
【課題】駆動輪のみを回転させる台上試験において、従動輪を備える車両の状態量を治具を用いずに簡易に計測することが可能な車両の状態量計測用制御システムを提供する。
【解決手段】備えた車両の状態量計測用制御システム30は、駆動輪である左右前輪の車輪速度を検出する左右前輪速度センサ31a,31b及び従動輪である左右後輪の車輪速度を検出する左右後輪速度センサ31c,31dによって検出された左右前輪の車輪速度及び左右後輪の車輪速度に基づいて、車両を制御するENG−ECU33a,VSA−ECU33b,AHB−ECU33cを備え、ENG−ECU33a,VSA−ECU33b,AHB−ECU33cは、外部端末装置40から台上試験中である旨の信号が入力された場合には、左右後輪の擬似車輪速度を生成し、検出された左右後輪の車輪速度に代えて、生成された左右後輪の擬似車輪速度を左右後輪の車輪速度とする。
(もっと読む)
自動車コントロール法及び装置
【課題】従来技術における問題を解決する自動車用の改善されたコントロールシステムを提供することである。
【解決手段】自動車速度計算機10が、最も遅い車輪の速度または2輪以上の車輪の平均速度として自動車速度を算出して自動車速度値を決定する構成を有し、車輪スリップ量が各車輪速度を算出した自動車速度と比較して決定される。コントローラ14に所定の車輪スリップ閾値が保存され、第2出力信号としての車輪スリップ量信号16が車輪スリップ閾値と常に比較され、車輪スリップ緩和のためのトルク緩和を要する状況であるか否かが決定される。車輪スリップ量信号16の値が車輪スリップ閾値を上回ると車輪スリップ状況と認定され、パワートレーンから車輪への付加トルクが緩和され、かくして車輪スリップ開始が、またはそれ以上の車輪スリップ発生が防止される。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及びトラクション制御が同時に実行される場合に、車輪速度を検出する装置の異常に起因して基準車輪速度が不適切な値になりトラクション制御が不適切に実行されることを防止する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回内輪以外の一つの車輪の車輪速度検出手段に実際の車輪速度よりも低い値として車輪速度を検出する異常が生じており且つ旋回補助制御が実行されているときには、旋回内輪を除く三つの車輪の車輪速度のうち二番目に低い車輪速度Vmedloに基づいて車輪の駆動スリップを判定するための基準車輪速度Vwbを設定する。
(もっと読む)
車両の走行制御装置
【課題】旋回補助制御及び制御対象車輪の全てについてのトラクション制御の両者が同時に行われる場合に、駆動要求が満たされない不満を運転者が感じる虞れを低減する。
【解決手段】旋回外輪に比して旋回内輪の前後力が小さくなるよう車輪の前後力を制御する旋回補助制御と、車輪の駆動スリップが過大であるときには当該車輪の前後力を低減することにより駆動スリップを低減するトラクション制御とを行う車両の走行制御装置。旋回補助制御の実行中にトラクション制御によって全ての制御対象車輪の前後力が低減される状況に於いては、旋回補助制御による旋回内輪の前後力の低減量を小さくし、或いは旋回補助制御による旋回内輪の前後力の低減を中止する。これにより旋回内輪の前後力の低減量が減少する量にて車両全体の駆動力が増大される。
(もっと読む)
1 - 10 / 131
[ Back to top ]