
国際特許分類[B60W10/20]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 異なる種類または異なる機能の車両用サブユニットの関連制御 (21,615) | 操向装置の制御を含むもの (589)
国際特許分類[B60W10/20]に分類される特許
1 - 10 / 589
操舵装置
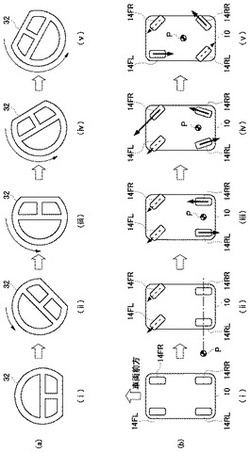
【課題】簡易且つ適切に旋回モードを移行させる。
【解決手段】操舵装置において、転舵機構は、前二輪および後二輪を有する車両10における前二輪および後二輪の各々をステアリング32の操舵に基づいて転舵する。駆動機構は、前二輪および後二輪の各々を個別に駆動する。転舵機構および駆動機構は、ステアリング32の操舵量が増加する過程において、前二輪を同位相に転舵する通常旋回モードから、前二輪を同位相に転舵するとともに後二輪の旋回外輪に前進方向の駆動力を与え後二輪の旋回内輪に後進方向への駆動力を与える小回り旋回モードを介して、後二輪を逆位相に転舵する信地旋回モードに移行させる。転舵機構は、信地旋回モードにおいて、前二輪の旋回内輪を直進方向に戻すよう転舵する。駆動機構は、信地旋回モードにおいて、前二輪の旋回内輪に後進方向の駆動力を与える。
(もっと読む)
ハイブリッド車両のパワーステアリング装置

【課題】ハイブリッド車両の良好な燃費性能を確保しつつ、大きな要求操舵トルクにも要求可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】本発明に係るハイブリッド車両(1)のパワーステアリング装置(20)は、モータ回生走行時にエンジン(2)が停止状態にあり、且つ、クラッチ(3)が切断状態にある場合、自車から所定範囲内に大きな操舵力を要する走行予定経路が検出されないとき、増幅手段(24)の駆動源として電動モータ(25)を選択し、自車から所定範囲内に大きな操舵力を要する走行予定経路が検出されたとき、エンジン(2)を始動して、増幅手段(24)の駆動源としてエンジン(2)を選択することを特徴とする。
(もっと読む)
車両制御システム
【課題】車両の挙動を安定させること。
【解決手段】車両10の旋回状態量に基づいた前輪Wfl,Wfrの転舵角又は前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御により車両10の挙動制御を行う車両制御システムにおいて、旋回走行中で且つ前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角が制御されており、更に車両10の旋回状態が所定よりも大きい高G旋回領域にある場合に、前記前輪Wfl,Wfr及び後輪Wrl,Wrrの夫々の転舵角の制御における後輪Wrl,Wrrの転舵角制御の介入度合いを減少させる又は当該後輪Wrl,Wrrの転舵角制御を停止させること。
(もっと読む)
車両の駆動力制御装置
【課題】車両の諸元の変化を検出することなく、車両の諸元の変化を考慮した駆動力を制御することができる車両の駆動力制御装置を提供することを目的とする。
【解決手段】車両のスタビリティファクタを目標値に追従させる制御量と、その車両に要求される要求加速度とに基づいて駆動力を制御する旋回性向上制御を備えた車両の駆動力制御装置において、所定の範囲内で変化させた車両の諸元に基づく車両性能を推測する車両性能推測手段(ステップS1)と、該車両性能推測手段によって推測された車両性能が、予め定められた車両性能を得られるか否かを判断する判断手段(ステップS2)とを備え、前記判断手段により予め定められた車両性能を得られないと判断された場合に、前記旋回性向上制御を実行しない。
(もっと読む)
車両のヨーモーメント発生旋回効率化装置
【課題】急な旋回の必要時に車両の旋回ヨーモーメントを効率的に発生させることができて、緊急操舵時の確実な転舵が行えるヨーモーメント発生旋回効率化装置を提供する。
【解決手段】左右の車輪1L,1Rを独立して制動力制御または駆動力制御可能なブレーキ4L,4Rおよび駆動系6のいずれか一方と、前記左右の車輪1L,1Rを独立して転舵可能な転舵装置3とを備えた車両20に適用される。操舵手段18の指令に従って転舵装置3を駆動するときに、左右の車輪1L,1Rの転舵動作に時間差を生じさせると共に、左右の車輪1L,1Rの制動・駆動力差を生じさせて旋回ヨーモーメントを発生させる旋回アシスト制御を行う制御手段9を設ける。
(もっと読む)
車両制御装置、車両制御プログラム、および車両制御方法
【課題】車両の運動状態を制御する車両制御装置において、より車両の安定性を向上させることができるようにする。
【解決手段】車両制御システムにおいては、外部力推定部40としての機能を利用して、当該車両の走行に伴って外部から受ける力を表す路面反力、路面の摩擦抵抗、車輪荷重、上下方向反力等の外部力を推定し、タイヤモデル制御部51、サスアームモデル制御部52、スプリング&ダンパモデル制御部53としての機能を利用して、駆動トルク、操舵力、ブレーキ油圧、および外部力に基づいて、制御対象部の運動状態を示す速度や加速度等のパラメータを推定する。そして、各モデル制御部51〜53としての機能を利用して、パラメータが予め設定された目標範囲内になるように、駆動トルク、操舵力、ブレーキ油圧等を補正する。
(もっと読む)
電動パワーステアリング装置および車両用制御装置
【課題】急発進する必要がある場合により早く発進できる状態とすることができる技術を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、電動モータ110と、ステアリングホイールの操作角度を検出する操舵角センサと、車両に設けられ予め定められた停止条件が成立した場合にエンジンを自動的に停止させるとともにエンジンが停止している状態で予め定められた始動条件が成立した場合にエンジンを自動的に再始動させるエンジン制御装置6に対して、予め定められた停止条件が成立した場合であってもエンジンの停止を禁止する旨を要求し、および/または予め定められた始動条件が成立していなくてもエンジンの再始動を要求するモータ制御部40と、を備え、モータ制御部40は、操舵トルクが基準トルクを超えている場合、あるいは操作角度が基準角度を超えている場合には、エンジンの停止を禁止する旨を要求、またはエンジンの再始動を要求する。
(もっと読む)
車両の制御装置
【課題】複数のモータにより左右の車輪を独立に回転駆動する車両について、車両の進行状態とステアリングの操舵状態とを一致させて、運転者の操舵負荷を軽減することができる車両の制御装置を提供すること。
【解決手段】ECU11は、車両1が直進状態にあるか否かを判定し、直進状態にあると判定した場合には、左側の車輪3a,3cと右側の車輪3b,3dとの間に回転数差(車輪速差)を設定し、車両の進行状態とステアリング4の操舵状態とを一致させるべく、各モータ10a〜10dの作動を制御する。
(もっと読む)
電動パワーステアリング装置
【課題】
電動パワーステアリング装置に異常が発生して操舵補助が停止された場合に、ディファレンシャルギアをアクティブ制御することによって、運転者の操舵感に違和感を与えることなく代替操舵補助を行うことのできる電動パワーステアリング装置を提供する。
【解決手段】
電動パワーステアリング装置の異常を検出する異常検出部と、左右の車輪の回転数差を調整するためのディファレンシャルギアとを設け、異常検出部が電動パワーステアリング装置の異常を検出したときに、ディファレンシャルギアが車両状態に基づいて代替操舵補助を行う。
(もっと読む)
車両制御装置、および車両制御プログラム
【課題】車両の制御量を演算する車両制御装置、および車両制御プログラムにおいて、車両における振動を適切に抑制することできるようにする。
【解決手段】車両制御システムを構成する各ECUは、車両における車室内の空気変動の情報を取得し(S210)、車室内の空気変動を変化させるための車両に対する制御量である空気変動補正制御量を演算し(S270)、空気変動補正制御量を出力する。このような車両制御システム1によれば、実際の空気変動に基づいた制御量を演算し出力するので、車室内の空気変動を変化させることができる。ここで、空気変動は、車両の振動に対応して生じるものと考えられるため、空気変動を変化させる(主に抑制する)ことによって車両の振動を抑制することができる。
(もっと読む)
1 - 10 / 589
[ Back to top ]