
国際特許分類[B60W30/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407)
国際特許分類[B60W30/00]の下位に属する分類
車両の挙動安定化制御 (585)
駐車時の自動運転 (95)
起こり得る又は差し迫った衝突の,予知又は回避 (451)
走行軌跡維持制御 (264)
クルーズコントロール (995)
車両の推進に関するもの (159)
国際特許分類[B60W30/00]に分類される特許
1 - 10 / 1,858
走行制御装置、及び移動体の走行制御方法
【課題】走行制限が解除された際の急加速を防止した安全な運転を行うこと
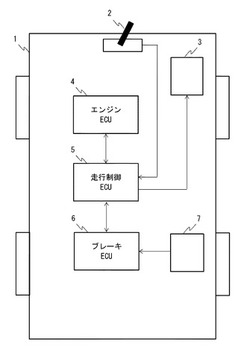
【解決手段】車両1は、アンテナ2を介して走行制限信号を受信する。走行制限信号は、走行制限エリアでの移動体の制限速度を含む。走行制御ECU5は、走行制限エリアでの車両速度を制限速度以下となるように制御する。走行制御ECU5は、アンテナ2を介して走行制限エリアでの走行制限の解除を指示する走行制限解除信号を受信する。走行制御ECU5は、当該受信の際に制限速度を超える加速操作を運転者が行っていた場合、車両1の停止制御を行う。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法

【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
車両運転支援装置、車両が走行する道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、楕円偏光が優勢な実際の道路環境においても正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】車両の車軸方向(または車両の高さ方向)に2つの偏光カメラを配置して偏光画像撮像系を構築した上で、車軸方向の偏光成分の光強度(H)および当該車両の高さ方向の偏光成分の光強度(V)から算出される偏光状態特徴量を、画像において対をなす画素毎に比較し、その差分が所定の閾値を超える場合に、これを路肩として検出する。検出された路肩の位置情報に基づいて、操舵制御手段、走行速度制御手段および警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
車両制御装置、および車両制御プログラム
【課題】車両の制御量を演算する車両制御装置、および車両制御プログラムにおいて、車両における振動を適切に抑制することできるようにする。
【解決手段】車両制御システムを構成する各ECUは、車両における車室内の空気変動の情報を取得し(S210)、車室内の空気変動を変化させるための車両に対する制御量である空気変動補正制御量を演算し(S270)、空気変動補正制御量を出力する。このような車両制御システム1によれば、実際の空気変動に基づいた制御量を演算し出力するので、車室内の空気変動を変化させることができる。ここで、空気変動は、車両の振動に対応して生じるものと考えられるため、空気変動を変化させる(主に抑制する)ことによって車両の振動を抑制することができる。
(もっと読む)
車両運動制御装置及びプログラム
【課題】簡単な構成のマップを用いて、設定されたジャークに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
【解決手段】所望の横移動距離Ye、速度の方向、現時刻の車体合成力の大きさF0、及び車体合成加速度の大きさの時間変化(ジャーク)KJを設定し、自車両の速度のx成分vx0、y成分vy0、Ye、F0/m、及びKJを用いた各々異なる3つのパラメータを演算し、3つのパラメータと、所望の位置へ到達する際の縦移動距離を最小化する車体合成力を求めるための第1の導入パラメータη1の特定仮定下での値η1’との関係、第2の導入パラメータη2の特定仮定下での値η2’との関係、回避時間teの特定仮定下での値te’との関係を定めた3次元マップを用いて、KJに従って車体合成力を増減させながら所望の位置へ到達する際の縦移動距離を最小化する車体合成力を導出する。
(もっと読む)
車両運動制御装置
【課題】制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両運動制御を実行することができるようにした車両運動制御装置を提供する。
【解決手段】異なる複数の制御対象を制御してアプリ要求値を実現する車両横方向運動制御を行う場合に、各制御対象のアベイラビリティ(最大制御量および制御量の変化量を含む制御可能範囲)をVLP、より詳しくはVLPのF/F演算部6やF/B演算部7に伝え、アベイラビリティに基づいて車両横方向運動制御に使用する制御対象の優先順位を決定する。このように、各制御対象のアベイラビリティを加味して車両横方向運動制御に使用する制御対象の優先順位を決定しているため、制御対象のアベイラビリティに応じて、より最適な制御対象を選択して車両横方向運動制御を行うことが可能となる。
(もっと読む)
車両走行制御装置
【課題】異なる駆動方式を持つそれぞれの車両に対して、駆動力源が要求する駆動力指令の対象が異なっても、駆動力指令の算出方法を変更することなく要求の対象となる駆動力指令を出力する車両走行制御装置を提供する。
【解決手段】予め算出された目標車速と、検出された実車速と、に基づいて目標加速度を算出する目標加速度演算部と、目標加速度から駆動力指令を算出し、算出された駆動力指令を出力する駆動力演算部と、を有し、駆動力演算部は、接続される駆動力源に応じて、予め定めた複数の変換比を用いて変換された、複数の駆動力指令のうち、少なくとも1つを出力する。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転者の嗜好・走行意図を車両の挙動の制御特性により的確に反映させて、運転者の満足度およびドライバビリティを向上させることのできる車両の制御装置を提供すること。
【解決手段】加速度が変化することに基づいて走行特性を変化させる車両の制御装置において、前記加速度が変化したことにより前記走行特性を変更する場合に、前記加速度が変化する直前に設定されていた変更前の前記走行特性に基づいて変更する前記走行特性の変更量を調整する走行特性変更手段(ステップS2)を設けた。
(もっと読む)
車両制御システム
【課題】隊列内に共通の制御形態での制御の対象外となる車両が存在していても、その隊列内での他車への追従性を向上させること。
【解決手段】隊列を成す複数の車両の車両モデルに基づく隊列モデルによる当該車両間の最適制御を行う車両制御システムにおいて、先頭車両と後続車両との間に存在している前記隊列モデルに組み込まれていない車両又は当該隊列モデルに組み込まない車両を除いた当該後続車両に対する先行車両との間で前記最適制御を車両の制御装置10に実行させること。例えば、その制御装置10には、後続車両の走行情報と、この後続車両が通信装置20で受信した先頭車両の走行情報と、この後続車両と先頭車両との間の車間距離の情報と、を用いて、前記最適制御における当該後続車両の制御目標値を設定させればよい。
(もっと読む)
運転支援装置
【課題】旋回半径が変化するような場合であっても、適切な目標軌道を設定することが可能な運転支援装置を提供すること。
【解決手段】前方道路を含む所定エリアに設定した複数のポイントの運動に関して、車両の運転者の注視点への視線方向を軸として、その軸周りで回転する回転運動成分を算出し、回転運動成分の大きさが等しい等ポテンシャルラインを車両の目標軌道として設定する。これにより、車両が旋回しようとするカーブ路の旋回半径が途中で変化している場合であっても、その旋回半径の変化に応じて動的に回転運動成分の強度分布も変化するので、等ポテンシャルラインにより適切な目標軌道を設定することができる。
(もっと読む)
1 - 10 / 1,858
[ Back to top ]