
国際特許分類[B60W30/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムであって目的によって特徴づけられるもの (4,407) | 起こり得る又は差し迫った衝突の,予知又は回避 (451)
国際特許分類[B60W30/08]に分類される特許
1 - 10 / 451
車両の衝突時安全装置
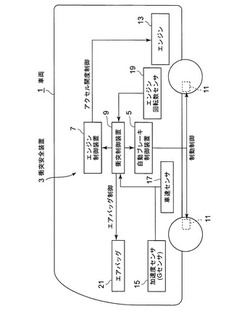
【課題】車両衝突時の二次被害を防止および軽減する衝突時安全装置に関し、エアバッグが展開しないような軽度の衝突時の安全策も含めて、簡単な制御によって二次被害を防止および軽減することを目的とする。
【解決手段】自動ブレーキ制御装置5と、エンジン制御装置7と、加速度センサ15と車速センサ17からの信号に基づいて、エアバッグ21、自動ブレーキ制御装置5およびエンジン制御装置7を制御する衝突制御装置9とを備え、衝突制御装置9は衝突時の加速度の大きさを基に重度衝突と軽度衝突とを判定し、重度衝突と判定した場合には、エアバッグを作動させると同時に、自動ブレーキをフルブレーキ状態とし且つエンジンを停止状態にし、軽度衝突と判定した場合には、エアバッグを作動させずに、自動ブレーキを衝突時の加速度に対応した中間ブレーキ力とし且つエンジンを停止状態にすることを特徴とする。
(もっと読む)
走行制御装置および車両

【課題】車両の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体の衝突回避を行うことができる走行制御装置および車両を提供すること。
【解決手段】車両1の進路方向における仮想バンパー領域71を広く設定する。これにより、車両1の進行先にある物体80との衝突回避を確実に行うことができる。一方、車両1の進行方向とは異なる方向においては、仮想バンパー領域71が車両1の進行方向と比して相対的に狭く設定されるので、車両1の進行方向とは関係のない場所にある物体との衝突回避動作を抑制できる。よって、車両1の進行先の影響を考慮しつつ、運転者に安心感を与えながら物体80の衝突回避を行うことができる。
(もっと読む)
車両制御装置
【課題】ACC制御とPCS制御を行っている自車両で、適切な制御対象物に対してACC制御の目標加速度を正確に算出することのできる車両制御装置を提供する。
【解決手段】物体を検出する検出手段と、当該物体を先行車両とし当該先行車両と自車両との車間距離を制御する車速制御手段と、検出手段によって検出された物体を衝突判断対象物とし当該衝突判断対象物と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断対象物と自車両とが衝突する可能性が高いと衝突判断手段が判断した場合に衝突判断対象物と自車両との衝突を回避するための回避制御を前記自車両に対して行う制御手段と、回避制御と自車両の車速の制御とが行われているときに予め定められた条件を満たした場合に、自車両の車速の制御を停止する停止手段とを備える。
(もっと読む)
制限車速設定装置及び制限車速設定方法
【課題】ナビゲーション装置などの情報から一意的に制限車速を決定しがたい道路であっても、より精度良く制限車速を提供可能とする。
【解決手段】自車進行方向前方の道路である自車走行予定道路の制限速度情報を第1の制限車速情報としてナビゲーション装置1から取得すると共に、車載の撮像部によって撮像された撮像画像に基づき走行中の道路の制限速度情報を第2の制限車速情報として取得する。そして、自車位置から予め設定した距離以内の自車走行予定道路に道路分岐部が存在すると検出すると、道路分岐部の道路曲率に基づき、第1の制限車速情報と第2の制限車速情報の一方を選択し、選択した制限車速情報に基づき制限車速を設定する。
(もっと読む)
運転支援装置
【課題】複数の物体の近傍を通過する際に運転者にとって違和感の少ない運転支援を行うことができる運転支援装置を提供する。
【解決手段】本発明は、自車両前方の物体を検出する道路構造認識部11及び物体検出部13と、物体の近傍を通過する際の上限通過速度を算出する上限通過速度算出部14と、上限通過速度に基づいて自車両Mの速度制御軌道SRを生成する速度制御軌道生成部17と、速度制御軌道SRに基づいて自車両Mの運転支援を実行する運転支援部18と、を備え、速度制御軌道生成部17は、複数の物体が検出された場合、自車両Mの進行方向Pにおける物体の密度ρに基づいて速度制御軌道SRを生成することを特徴とする。
(もっと読む)
進路評価装置
【課題】車両の干渉形態判定の切り替わりが頻繁に行われることを抑制して適切な評価が行える進路評価装置を提供すること。
【解決手段】 自車両の進路候補を生成し(S12)、他車両の進路を予測し(S14)、自車両の進路候補と他車両の予測進路の干渉形態について他車両が自車両に干渉する形態であるか、自車両が他車両に干渉する形態であるかを繰り返し判定し、先に判定された干渉形態が維持されやすいように干渉形態の判定基準を設定して干渉形態を判定し(S18)、その判定結果に基づいて自車両の進路候補の評価を行う(S20)。先に判定された干渉形態が維持されやすいように干渉形態の判定基準を設定して干渉形態を判定することにより、自車両の進路候補又は他車両の予測進路に検出誤差を生じた場合に干渉形態の判定が頻繁に入れ替わることを抑制することができ、安定した干渉形態の判定に基づき適切な進路評価を行うことができる。
(もっと読む)
運転支援装置
【課題】外乱が発生しても、適切な運転支援を行うことができる運転支援装置を提供する。
【解決手段】運転支援装置1のECU6は、自車両の速度、自車両と先行車両との相対距離及び相対速度等の情報を取得する位置・速度情報取得部8と、その情報に基づいて先行車両に対する自車両の運転者のPREを算出する危険感指標算出部9と、運転者のPREの時系列データを表わすPRE変動量を算出する危険感指標変動量算出部11と、PRE変動量の変化率に基づいて忘却パラメータを決定する忘却パラメータ決定部12と、忘却パラメータを用いて先行車両に対する自車両の危険予測を行う危険予測部13と、危険予測結果に応じて運転者のブレーキ操作タイミングやハンドル操作タイミングを算出する操作タイミング算出部14と、運転者が必要なタイミングでブレーキ操作やハンドル操作を行わないときに警報器7より警報を発するように制御する運転支援部15とを有している。
(もっと読む)
車両の統合制御装置
【課題】衝突防止制御装置が自動ブレーキを発生して障害物との衝突を回避するにあたり、ABSの作動や車両の走行状態を考慮しつつ4輪の前後力を最大限活用して短い制動距離で停止することを可能として安全性、信頼性を向上させる。
【解決手段】衝突防止制御装置30が障害物との衝突を防止する制動力を発生させる際に、統合制御ユニット50は、自車両が直進状態の場合は、ディレイ時間Tdeが経過するまでは前後軸間の締結トルクCawdとして通常時に設定される締結トルクの値またはデフロック状態となる締結トルクの値である第1のトランスファクラッチトルクを設定させ、その後は、締結トルクCawdを略0に近い第2のトランスファクラッチトルクに低下させる。また、自車両が旋回状態の場合は、第2のトランスファクラッチトルクを設定させる。
(もっと読む)
車両制御装置
【課題】PCS制御が作動した場合において、自車両と当該自車両周囲の物体との衝突を想定した制御を行うことのできる車両制御装置を提供する。
【解決手段】自車両の周囲の物体を検出する物体検出手段と、自車両が右折または左折したか否かを判断する右左折判断手段と、物体検出手段によって検出された物体と自車両とが衝突する可能性を判断する衝突判断手段と、衝突判断手段が物体と自車両とが衝突する可能性が高いと判断した場合に第1の制御を行う第1の制御手段と、右左折判断手段によって自車両が右折または左折したと判断され、かつ衝突判断手段によって自車両が右折または左折した先に存在する物体と衝突する可能性が高いと判断された場合には第2の制御を行う第2の制御手段とを備える。
(もっと読む)
運転支援制御装置の条件設定方法及び運転支援制御装置
【課題】運転者が支援制御に対して過信や依存をすることが抑制できる最適な時期に、支援制御を開始することができる車両運転制御装置を提案すること。
【解決手段】車両運転制御装置は、運転者に制動操作を促す警報を発生する。警報を発生する制御は、実相対速度Vr、車両CAの車速Vm、先行車両TAの減速度Ap、実相対距離Drなどの複数の物理量に基づいて算出された指標値PREが決定指標値PREtを越えることを行われる。決定指標値PREtは、車両CAの走行中に運転者により実際に制動操作が行われた際における操作時指標値PRErを複数算出(ステップS10〜S14)し、算出された複数の操作時指標値PRErで形成される操作時指標値領域のうち、車両CAの危険性が高まる方向に指標値PREが変化する側の端部に対応する端部操作時指標値よりも危険側の値を決定指標値PREtに設定する(ステップS15)。
(もっと読む)
1 - 10 / 451
[ Back to top ]