
国際特許分類[B60W40/00]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216)
国際特許分類[B60W40/00]の下位に属する分類
周囲の環境に関するもの (507)
運転者又は同乗者の状態に関するもの (279)
車両挙動に関するもの (350)
車両自体のパラメータに関するもの (70)
国際特許分類[B60W40/00]に分類される特許
1 - 10 / 10
距離推定装置
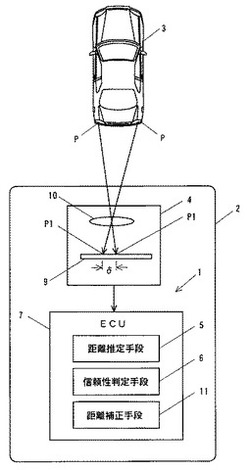
【課題】自車両と当該自車両の周囲に存在する障害物との距離を推定し、その推定値が信頼できるものかどうかを判定することにより、距離の誤認識を防止することができる距離推定装置の提供。
【解決手段】自車両と、自車両周辺に存在する障害物との距離を推定する距離推定装置であって、自車両周辺を撮像する撮像手段と、上記撮像手段が撮像した画像から上記障害物の複数の特徴点の像を抽出し、上記画像内の特徴点間距離に基づき上記自車両と上記障害物の距離を推定する距離推定手段と、上記画像内における上記複数の特徴点の像のうち少なくとも一つの特徴点の像の位置に基づき、上記距離推定手段が推定する距離の信頼性を判定する信頼性判定手段とを備える。
(もっと読む)
車両の挙動制御装置及び車両の挙動制御方法

【課題】車両の挙動を制御させるための複数の制御対象の制御要求値を適切に設定することができる車両の挙動制御装置及び車両の挙動制御方法を提供する。
【解決手段】要求値設定部26は、第1の制御対象に対する第1要求ヨーレートγ_act1を設定する第1要求値設定部40と、第1要求ヨーレートγ_act1に基づき駆動する第1の制御対象の第1ヨーレート推定値γs_act1を取得する第1推定値取得部41と、第1定常不足量TF1及び第1推定遅れ量SF1のうち少なくとも第1推定遅れ量SF1を算出する第1算出部42と、第2の制御対象に対する第2要求ヨーレートγ_act2を設定する第2要求値設定部43と、第2要求ヨーレートγ_act2に基づき駆動する第2の制御対象の第2ヨーレート推定値γs_act2を取得する第2推定値取得部44とを備えている。
(もっと読む)
車両の制御装置
【課題】車両の走行環境や運転指向をより的確に反映した走行特性とすることによりドライバビリティを向上させる。
【解決手段】走行している車両の状態に基づいてパラメータ(指標)を求め、前記車両に搭載されているアクチュエータの制御量をそのパラメータに基づいて決定する車両の制御装置において、前記パラメータに対する前記制御量を複数のアクチュエータ毎に予め設定しておき、前記パラメータが求められた場合にその単一のパラメータに基づいて前記複数のアクチュエータ毎の制御量を求める(ステップS31,S32,S33)とともにその制御量に基づいて各アクチュエータを制御するように構成されている。
(もっと読む)
車両用走行エネルギー演算システム
【課題】車両の走行エネルギーを精度良く演算することができる車両用走行エネルギー演算システムを提供する。
【解決手段】 車両用走行エネルギー演算システム1は、車両に搭載されたECU8及び車両DB9と、センターCに設置されたセンターDB12とを備えている。車両DB9には、車両パラメータ、各種センサの検出値、自車両の運転者の速度偏差値及び加速度偏差値等が格納される。センターDB12には、道路パラメータ、任意地点における複数の運転者の速度特性データ及び加速度特性データ等が格納される。ECU8は、自車両の運転者の速度偏差値及び加速度偏差値と複数の運転者の速度特性データ及び加速度特性データとに基づいて、自車両が走行経路上の任意地点を通るときの速度及び加速度を推測し、その推測結果に基づいて自車両の走行パワーを求める走行パワー演算部16を有している。
(もっと読む)
車両制御装置および車両制御方法
【課題】より適切なタイミングで走行計画を見直すことができ、これにより、さらに的確な走行計画を効率的に生成することができる車両制御装置および車両制御方法を提供することを課題とする。
【解決手段】本発明の車両制御装置および車両制御方法は、車両が走行する走行計画を生成し、生成された走行計画に基づきアクチュエータを制御追従することにより、車両を走行制御する計画実現し、計画実現において、アクチュエータの制御追従が走行計画に対して不足する状況を予測した場合、当該走行計画の見直し指令を出力する。
(もっと読む)
情報処理装置、及び車両
【課題】性能の異なる駆動モータを有する車両間で追従走行を良好に行う。
【解決手段】先行車両2と追従車両3は、出力マップをそれぞれ保持している。先行車両2は、追従車両3が追従走行を行う前に、追従車両3から出力マップを送信してもらう。そして、先行車両2は、これを自車両の出力マップと合成して、先行車両2と追従車両3の何れの車両の駆動モータでも出力しうる仮想のマップであるエミュレーションマップを生成し、自車両でこれを保持すると共に追従車両3にも送信する。先行車両2と追従車両3は、エミュレーションマップに従った出力を行うような制御系を有しており、この制御系を駆動モータに対する指令の出力の直前に作用させることで、先行車両2と追従車両3の駆動モータの性能差を調整し、良好な追従走行を行うことができる。
(もっと読む)
自動変速機の変速制御装置
【課題】具備した変速機構に特有の固定ギヤを利用して計測したトルク値に基づき、トルクリダクション等のトルク変更が目標通りに適正に行われたか否かを判定し得るようにした自動変速機の変速制御装置を提供する。
【解決手段】歪みゲージ24及びトルク値算出手段16が、反力に基づきサンギヤに作用するトルク値を検出し、入力相当値算出手段42が、検出されたトルク値に基づく入力トルク相当値を算出し、トルクリダクション指令手段13が、エンジン2に対してトルク変更を行う指令を出力し、トルク変更判定手段43が、算出された入力トルク相当値に基づき、エンジンが指令に沿って適正にトルク変更されているか否かを判定する。このため、自動変速機構5に特有のサンギヤを利用して計測したトルク値に基づき、エンジンに対するトルク変更が目標通りに適正に行われたか否かを的確に判定することができる。
(もっと読む)
走行制御装置
【課題】フィードバック制御によって車両の走行制御を行う場合により高精度な走行制御を行うことができる走行制御装置を提供することを課題とする。
【解決手段】走行計画に従って走行するようにフィードバック制御によって車両を走行制御する走行制御装置1であって、走行計画における目標軌跡の位置毎に重視する制御項目を決定する制御項目決定手段41と、この決定された重視する制御項目の制御ゲインを他の制御項目より高くする制御ゲイン決定手段41と、この決定された制御ゲインを走行計画に組み込む走行計画補正手段41とを備えることを特徴とする。
(もっと読む)
走行制御計画生成システム及びコンピュータプログラム
【課題】自車両の走行方針を満足しつつ、周辺環境の状況変化に柔軟に対応することを可能とする走行制御計画生成システムを提供する。
【解決手段】走行制御計画生成システム1は、車両Aの走行方針に沿う上位計画を生成する上位計画生成手段22aと、上位計画を達成する計画であって、少なくとも走行軌跡を含む下位計画を生成する下位計画生成手段22bと、周辺車両B,Cの少なくとも走行軌跡を含む下位計画を取得する下位計画取得手段16,30と、周辺車両B,Cの下位計画を考慮して、車両Aの下位計画を所定の指標により評価する評価手段24と、評価手段24による評価に基づいて、車両Aが実行する下位計画を選定する下位計画選定手段26と、を備える。
(もっと読む)
自動車の追従走行システム
【課題】
自車両と前方車両との目標車間距離を維持しながら自車両を前方車両に追従走行させる自動車の追従走行システムにおいて、自車両の走行環境に適合した目標車間距離を迅速・確実に設定することを課題とする。
【解決手段】
追従走行システムは、自車両と前方車両との目標車間距離の設定に用いる補正係数を道路毎及び月日時刻毎の過去の交通情報に基いて生成する生成部22aと、前記補正係数を道路毎及び月日時刻毎に記録する記録部22bと、自車両が走行中の道路を検出するナビゲーションシステム20と、現在の月日時刻を検出するコントロールユニット10とを有し、前記目標車間距離は、前記記録部22bで記録されている補正係数のうちナビゲーションシステム20で検出された道路及びコントロールユニット10で検出された月日時刻に該当する補正係数を用いて設定される。
(もっと読む)
1 - 10 / 10
[ Back to top ]