
国際特許分類[B60W40/08]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 運転者又は同乗者の状態に関するもの (279)
国際特許分類[B60W40/08]に分類される特許
1 - 10 / 279
車両姿勢制御装置
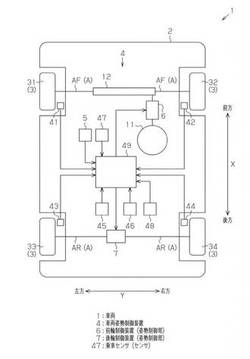
【課題】所定の乗車位置における乗り心地の向上に貢献する車両姿勢制御装置を提供する。
【解決手段】車両姿勢制御装置4は、車両1の姿勢を制御する前輪制御装置6および後輪制御装置7を備える。前輪制御装置6および後輪制御装置7の少なくとも一方は、車両1に乗っている乗員の数である乗員数および車両1に乗っている乗員の位置である乗車位置を検出する乗車センサ47の出力に基づいて車両1の姿勢を制御する。
(もっと読む)
眠気予測装置

【課題】ドライバが過去に車両で通ったことのない移動経路に対しても、ドライバの眠気の状態を良好に予測することのできる眠気予測装置の提供。
【解決手段】図5に例示するように、天候・時間帯・体調・道路パターンの組み合わせに対して、どれだけ継続して走行したら(継続距離)眠気レベルがどう遷移するか(眠気レベル遷移)が対応付けて記憶したデータベースを備えている。ドライバにより天候,時間帯,体調が入力され、ナビゲーション装置により移動経路が検索されてその移動経路の各セグメントの道路パターンが取得されると、データベースから眠気レベルが上昇するデータセットが抽出され、そのデータセットに対応した継続距離に基づいて眠気誘発エリアが予測される。
(もっと読む)
車両の走行制御装置
【課題】円滑な道路交通を促進できるようにしながら、運転者が脇見運転をした場合には走行安全性を確保することができるようにした、車両の走行制御装置を提供する。
【解決手段】
自車両の運転者の顔の向きから運転者が脇見状態であるかを判定する脇見状態判定手段30aと、自車両に先行する先行車両の情報を検出する先行車検出手段31と、運転者の加減速要求に対応して自車両の走行駆動源の出力を制御する走行制御手段10と、先行車検出手段31の検出情報から自車両の先行車両への追突可能性を判定する追突判定手段30と、を備え、走行制御手段10は、脇見状態判定手段30aにより運転者が脇見状態であることが判定され、且つ、追突判定手段30により自車両の先行車両への追突可能性があると判定されると、加減速要求に対応した走行駆動源の出力を抑制側に補正する。
(もっと読む)
乗り物の操作者のパフォーマンス見積もりを向上させるためのシステムおよび方法
【課題】本発明は、乗り物の操作者のパフォーマンス見積もりを向上させるためのシステム。
【解決手段】本システムは、乗り物の操作のパフォーマンス状態の見積もりを行なうための第1の方法408を実装する第1のモジュールと、操作者の生理学的状態および行動状態のうちの少なくとも1つの見積もりを行なうための第2の方法410を実装する第2のモジュール404と、前記第1および前記第2のモジュールの見積もりによる状態を共有するための手段と、を包含し、前記第1および前記第2のモジュールのうちの1つの前記見積もりの方法が、前記第1および前記第2のモジュールのうちの他方の1つの状態に基づいて調整され、それによって前記乗り物の操作のパフォーマンス状態および前記操作者の前記生理学的状態および/または行動状態のうちの少なくとも1つの前記見積もりを向上させる。
(もっと読む)
車体速度制御装置
【課題】運転者に対して快適な運転支援が行われるように車体速度を制御できる車体速度制御装置を提供すること。
【解決手段】ブレーキ制御ECU1が、速度制御位置設定処理を実行することにより、積荷スペースに荷物が搭載された場合には(S12:Yes)、車輪速度の演算される位置(制御位置)として積荷スペースの位置が設定され(S13)、車両VLの走行路が狭幅道路である場合には(S14:Yes,S15:Yes)、車輪速度の演算される位置(制御位置)として旋回外側のフェンダーミラーの先端の位置が設定される。このように、車両における状況や環境に応じて、搭乗者に対する運転支援を行うのに適切な位置を車体速度が制御される位置として設定することができるので、搭乗者に対して快適な運転支援が行われるように車体速度を制御できる。
(もっと読む)
車両用運転支援装置及び車両用運転支援方法
【課題】ドライバの覚醒を促す情報の出力時における車両の運転支援制御をより適切に行うことを目的としている。
【解決手段】運転支援装置100は、ドライバの覚醒度に応じてドライバの覚醒を促す情報である覚醒促進情報を出力する覚醒促進情報出力部123と、車線維持支援モード及び車間距離維持支援モードを含む運転支援モード、又は車線逸脱警報モード及び接近警報モードを含む警報モードのいずれか一方のモードを設定するモード設定部125とを含み、モード設定部125は、覚醒促進情報出力部123が覚醒促進情報を出力してから予め設定した時間が経過するまでの期間において、運転支援モードを設定する。
(もっと読む)
シフトショック低減構造を備える車両
【課題】シフトショック低減構造を備える車両において、車体環境の変化に応じてシフトショックを低減できるようにすることを目的とする。
【解決手段】変速機構としてのAMT10を備えるエンジンEと、変速段を検知するギヤポジションセンサ30と、エンジンEの回転数を検出するエンジン回転数センサ29とを備え、各変速段に応じてシフトショックを低減できるよう変速時にエンジンEの回転数制御を行うシフトショック低減構造を備える車両において、AMT10は、運転者の変速操作に応じてクラッチ操作が自動化されたマニュアルトランスミッションであり、変速段の変更後に各変速段に応じた回転数制御を行い、クラッチ11を自動で接続し、且つ、二人乗りを検出するパッセンジャー検出手段を備えており、目標スロットル開度を決定する際のスロットル開度補正演算に乗車人数を加味する。
(もっと読む)
ドライバ状態判定装置
【課題】ドライバの意識低下状態を精度よく判定できるドライバ状態判定装置を提供すること。
【解決手段】車両のドライバが意識低下状態であるか否かを判定するドライバ状態判定装置において、接近状態予測値dp(n)が第1閾値A1より大きいか否かを判定し(S16)、大きい場合には接近状態値d(n)が第1閾値A1より大きいか否かの判定を行い(S18)、大きい場合には意識低下判定を行う。また、接近状態予測値dp(n)が第1閾値A1以下の場合は、接近状態値d(n)が第1閾値A1より大きな第2閾値A2を上回っているか否かの判定を行い(S20)、上回っている場合に限り意識低下判定を行う。このように、接近状態予測値dp(n)が小さいときは意識低下の判定閾値を大きくすることにより、車両が一時的に且つ意識的に先行車に近づいた場合における誤判定が抑制される。
(もっと読む)
意識低下判定装置
【課題】通常時の操舵量を適切に演算し設定することにより、外乱や意識低下状態の操舵量が混入しないように運転者の意識低下判定を行い、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供する。
【解決手段】運転者が操舵操作を行うまでの直近の一定時間における、車両又は運転者の状態を示す指標が所定値以下の場合の操舵角分散を通常操舵量として演算する通常操舵量演算部51、運転者の操舵量と通常操舵量との乖離度を演算する操舵乖離度演算部55、操舵乖離度が所定値以上であるか否かを判定する操舵乖離度判定部56、及び、操舵乖離度が所定値以上である場合に、運転者が意識低下状態であると判定する意識低下判定部57を備えて構成される。通常時の操舵量に外乱や意識低下状態の操舵量が混入することを防止することにより、居眠り運転の誤検出や未検出を減少させ、精度よく意識低下判定を行うことが可能となる。
(もっと読む)
意識低下判定装置
【課題】車両の走行状態を考慮し車両の逸脱危険度を加味して運転者の意識低下判定を行うことにより、運転者の意識低下状態を精度よく判定できる意識低下判定装置を提供すること。
【解決手段】逸脱危険度MLCの値の保持数が設定数aより大きい場合、かつ、車両Mにおいて操舵がやっと行われて、記憶保持された逸脱危険度MLCが減少する傾向にあると判定された場合、すなわち、操舵が行われず走行車線から逸脱してしまうおそれのある状態からハンドル操作の修正が大きく行われた無操舵後修正過大状態の場合、既に規定された閾値(破線で示された閾値)よりも、所定値(または所定割合)だけ低い値を、この閾値Tに変更して決定する。
(もっと読む)
1 - 10 / 279
[ Back to top ]