
国際特許分類[B60W40/10]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムのためのパラメータの推定または演算 (1,216) | 車両挙動に関するもの (350)
国際特許分類[B60W40/10]に分類される特許
1 - 10 / 350
電子制御装置
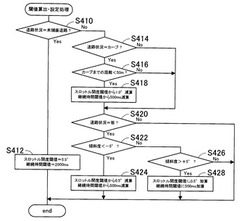
【課題】車両が走行する道路状況に応じて運転情報を適切に記憶する電子制御装置を提供する。
【解決手段】電子制御装置は、判定条件を満たす車両挙動が発生した場合に運転情報を記憶する処理を行う場合、車両が走行している道路状況に対応して判定条件のスロットル開度閾値、継続時間閾値を基準閾値に基づいて設定する。電子制御装置は、道路状況が未舗装道路であるか(S410:Yes)、傾斜角度が+5°より大きい上り坂の道路状況の場合(S426:Yes)、スロットル開度閾値および継続時間閾値を基準閾値よりも大きくして車両の加速状態が判定条件を満たしにくくし、カーブまでの距離が50m未満の道路状況であるか(S416:Yes)、道路状況が傾斜角度が−5°より小さい下り坂の場合(S422:Yes)、スロットル開度閾値、継続時間閾値を減算して車両の加速状態が判定条件を満たしやすくする。
(もっと読む)
車両のパワーホップ検出方法

【課題】 本発明は、車両が損傷を受ける可能性のあるパワーホップ状態を検出し、さらにそのような場合に、パワーホップを軽減するなどの対処をすることを目的とする。
【解決手段】 車両101の前後加速度の現在と前回の信号を含む連続した複数の信号を取得し、連続した信号の周期と振幅を算出し、連続した信号のそれぞれの周期と振幅の組み合わせが第1所定値PH_Map1を上回るか否かを判定し、現在の信号の周期と振幅の組み合わせが、第1所定値PH_Map1よりも大きい第2所定値PH_Map2を上回るか否かを判定し、現在の信号の周期と振幅の組み合わせが第1所定値PH_Map1を上回り、かつ現在の信号の周期と振幅の組み合わせが第2所定値PH_Map2を上回るかどうかに基づいてパワーホップの状態を判断する。
(もっと読む)
自動二輪車のピッチ角推定装置及びピッチ角推定方法
【課題】自動二輪車の車体のピッチ角を算出するに際して、傾斜センサ等の専用のセンサを使用することなく、車速センサからの信号のみでピッチ角が推定可能なピッチ角推定装置を得る。
【解決手段】自動二輪車の車速を検出する車速検出手段1と、前記車速検出手段で検出された車速vを基に、1階微分項dv/dt及び2階微分項d2v/dt2を求める微分項算出手段2と、前記微分項算出手段で検出された1階微分項dv/dt及び2階微分項d2v/dt2から、A,Bを係数として、ピッチ角θ=Adv/dt+Bd2v/dt2を計算してピッチ角θを算出するピッチ角算出手段3とを備える。
(もっと読む)
電子制御装置
【課題】判定条件を満たす車両挙動が発生すると、そのときの運転情報を記憶するとともに、車両挙動の発生傾向に基づいて不要な運転情報の記憶を防止する電子制御装置を提供する。
【解決手段】電子制御装置は、アクセル開度全閉で車速が40km/hを超えている状態が2秒以上経過している条件が成立していない状態から成立状態になると(S410:Yes、S414:No)、そのときのエンジン回転数が該当するエンジン回転数の段階をS420、S432、S442で判定し、該当する段階のカウンタと、それよりもエンジン回転数の低い段階のカウンタとをカウントアップする(S422〜S426、S434、S436、S444)。電子制御装置は、高回転数の段階から判定して、カウント数が5回を超えるカウンタに該当する段階の高回転数側の境界条件を、運転情報を記憶するときの判定条件とする(S430、S440、S448)。
(もっと読む)
自動車の重心の連続計算
【課題】自動車の重心を計算するシステムおよび方法を提供すること。
【解決手段】1つの方法は、x軸、y軸、およびz軸に沿った自動車の第1、第2、および第3の加速度を判定するステップと、x軸、y軸、およびz軸に沿った自動車の第1、第2、および第3の角速度を判定するステップと、自動車に作用する合力を判定するステップと、自動車の見積質量を判定するステップとを含む。本方法は、第1の加速度、第2の加速度、第3の加速度、第1の角速度、第2の角速度、第3の角速度、自動車に作用する合力、および見積質量に基づいて、自動車の重心を計算するステップをさらに含む。
(もっと読む)
車両の制御装置
【課題】駆動や制動を伴う旋回走行を安定的に行うようにスタビリティファクタを実際の車両に適したものとすることのできる車両の制御装置を提供すること。
【解決手段】車両が旋回走行する際のスタビリティファクタを予め設定された定義式に基づき該車両が加減速度を伴って旋回走行する際にも拡張させて算定し、その拡張させたスタビリティファクタに基づいて旋回走行時の挙動を制御する車両の制御装置において、前記車両が加減速を伴わずに旋回走行する場合に前記定義式を構成する複数の項のうち前記車両の前後加速度に依存しない項のみを補正し、前記車両が前記加減速を伴って旋回走行する場合に前記前後加速度に依存する他の項を補正することにより、前記定義式を更新するスタビリティファクタ更新手段(ステップS4,S5,S19)を設けた。
(もっと読む)
ヨーレート推定装置及びそれを用いた車両姿勢制御装置
【課題】ヨーレートセンサに頼らずにヨーレートを推定し、ヨーレートセンサが故障したときでも、車両姿勢制御を継続可能にする。
【解決手段】電動モータ20に流れる電流を検出し、検出された値に基づき、軸力Fを推定する。予め設定され記憶された軸力及び横加速度の関係に、前記推定された軸力を適用して、横加速度Gを推定し、このに推定された横加速度Gを用いて、車両のヨーレートを推定する。
(もっと読む)
車両状態量推定装置
【課題】車両の挙動制御時における挙動の急変を抑制することのできる車両状態量推定装置を提供すること。
【解決手段】車両1の挙動制御に用いる目標横加速度Gytを車両1の走行時における横加速度実測値Gysと横加速度推定値Gyeとに基づいて推定する車両状態量推定装置2において、横加速度実測値Gysと横加速度推定値Gyeとに基づいて目標横加速度Gytを推定する場合には、車両1の横滑りの状態に応じて横加速度実測値Gysと横加速度推定値Gyeとに重み付けを行うことにより推定すると共に、横滑りが所定値以上になった場合には横滑りの状態に関わらず横加速度実測値Gysの重み付けが大きい状態を維持し、横加速度実測値Gysと横加速度推定値Gyeとの差が所定値以下の状態が所定時間継続した場合に、横加速度実測値Gysの重み付けが大きい状態を解除する。
(もっと読む)
車両発進状態推定装置
【課題】 簡単且つ低コストな構成でありながら、精度良く坂道発進などの車両発進状態を推定することができる車両発進状態推定装置を提供する。
【解決手段】 このため、本発明に係る車両発進状態推定装置は、エンジン側と駆動系側とを接断可能なクラッチ機構が介装された車両の発進状態を推定する車両発進状態推定装置であって、少なくとも車速と、エンジン回転速度と、エンジン負荷と、アクセルペダルの踏み込み量と、を含む車両の運転状態量に基づいて、車両の坂道発進状態を推定することを特徴とする。なお、車速が所定以下であり、アクセルペダルの踏み込み量が所定以上であり、エンジン回転速度が所定範囲にあり、エンジン負荷が所定以上であり、エンジン負荷の積分値が所定以上であることを条件として含み、これらが成立したときに、車両は発進補助が必要な坂道発進状態であると推定することができる。
(もっと読む)
走行抵抗算出装置
【課題】実走行状態の車両に生じる抵抗を簡素な構成で算出可能な走行抵抗算出装置を提供する。
【解決手段】ホイール6分力計11〜14によって計測されたトルクと、ドライブシャフトC1,C2によって計測されたトルクとに基づいて、走行抵抗算出部41が、コーナリング抵抗、タイヤスリップ損失抵抗、タイヤ転がり抵抗、ブレーキ・ハブベアリング摺動損失抵抗、及びデファレンシャル差動摩擦抵抗を算出し、算出結果に基づいて車両の走行抵抗を算出する。また、走行抵抗算出部41が、車両の空気抵抗を算出し、算出された空気抵抗に基づいて車両の走行抵抗を算出する。
(もっと読む)
1 - 10 / 350
[ Back to top ]