
国際特許分類[B60W50/04]の内容
処理操作;運輸 (1,245,546) | 車両一般 (234,424) | 異なる種類または異なる機能の車両用サブユニットの関連制御;ハイブリッド車両に特に適した制御システム;特定の単一のサブユニットの制御に関するものではない、特定の目的のための道路走行用車両の運動制御システム (34,847) | 特定の単一のサブユニットの制御に関するものではない道路走行用車両の運動制御システムの細部 (393) | 制御システムの機能の監視 (13)
国際特許分類[B60W50/04]に分類される特許
1 - 10 / 13
電子制御装置
【課題】車両が走行する道路状況に応じて運転情報を適切に記憶する電子制御装置を提供する。
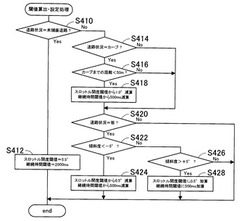
【解決手段】電子制御装置は、判定条件を満たす車両挙動が発生した場合に運転情報を記憶する処理を行う場合、車両が走行している道路状況に対応して判定条件のスロットル開度閾値、継続時間閾値を基準閾値に基づいて設定する。電子制御装置は、道路状況が未舗装道路であるか(S410:Yes)、傾斜角度が+5°より大きい上り坂の道路状況の場合(S426:Yes)、スロットル開度閾値および継続時間閾値を基準閾値よりも大きくして車両の加速状態が判定条件を満たしにくくし、カーブまでの距離が50m未満の道路状況であるか(S416:Yes)、道路状況が傾斜角度が−5°より小さい下り坂の場合(S422:Yes)、スロットル開度閾値、継続時間閾値を減算して車両の加速状態が判定条件を満たしやすくする。
(もっと読む)
車両の挙動データ記憶制御システム、電子制御装置、データ記憶装置

【課題】「予期せぬ挙動」に対応した挙動データのみの利用が可能なように記憶させることができるようにする。
【解決手段】記憶制御装置30は、取得した挙動データが「予期せぬ挙動」を示すものであるか否かを判断し、「予期せぬ挙動」であると判断したときにはその時点で不揮発性メモリ34に当該「予期せぬ挙動」を示す挙動データを記憶する。クルーズECU4は自身の制御に起因する挙動変化が有ったと判定したときには、当該判定結果をCAN2に送信し、さらに前記記憶制御装置30は、記憶した挙動データの内容とクルーズECU4から送信された判定結果の内容とが一致するか否かを判断し、一致すれば不揮発性メモリ34で記憶した前記挙動データを削除又は上書き許可する。
(もっと読む)
車両用故障診断装置
【課題】車両運転者が、バイワイヤシステムの故障検出のために必要な操作を容易に行うことができる技術を提供
【解決手段】バイワイヤ制御部15は、起動スイッチのオン後に、ステアリング可動域制限部11(アクセル可動域制限部12、ブレーキ可動域制限部13)により、ステアリングST(アクセルペダルAP、ブレーキペダルBP)の操作を0°〜54°(0%〜10%、0%〜10%)の範囲内に制限する。そして、ステアリング操作量(アクセル操作量、ブレーキ操作量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)内であると判断した場合に、転舵量(駆動量、制動量)が、ステアリング診断開始判定範囲(アクセル診断開始判定範囲、ブレーキ診断開始判定範囲)に応じて予め設定されたステアリング正常判定範囲(アクセル正常判定範囲、ブレーキ正常判定範囲)内であるか否かを判断する。
(もっと読む)
制御システム
【課題】制御の信頼性を確保しながら、余分なコストを抑えることができる制御システムを得る。
【解決手段】ネットワーク100にそれぞれ接続され、互いに異なる対象を制御する複数の制御装置を備えた制御システムであって、第1種制御装置であるエンジン制御装置110の制御対象に対する制御のうち、所定の制御の制御量を演算するための制御量演算手順を、エンジン制御装置110、および第2種制御装置であるメータ制御装置120とAT制御装置130がそれぞれ記憶し、エンジン制御装置110は、自身が演算した所定の制御に関する制御量と、メータ制御装置120で演算された所定の制御に関する制御量とを比較し、比較結果が異なるときには、AT制御装置130で演算された所定の制御に関する制御量と再び比較し、その比較結果に応じて自身の制御対象を制御する。
(もっと読む)
装置の少なくとも1つのシステムを診断および/または調整する方法
【課題】技術的な装置、特に自動車のシステムを最適な方法で検査、調節、調整および/または改良することができ、診断にかかる時間を短縮する、かつ/または正確な結果を得る。
【解決手段】装置の少なくとも1つのシステムを診断および/または調整する方法において、(a)装置の少なくとも1つのシステムにおける少なくとも1つの制御変数を制御変数の実際値に関して変更するステップと、(b)少なくとも1つのシステムの少なくとも2つの状態変数を検出するステップと、(c)少なくとも2つの状態変数に関係して、方法のさらなる実施について決定を行うステップとを含む方法。
(もっと読む)
車両制御システム
【課題】自車両と他車両との通信性能が低下した場合であっても、自車両と他車両との相対位置関係を制御することが可能な車両制御システムを提供する。
【解決手段】自車両と他車両との間の通信障害の有無を判定し、通信障害が発生していない通常時には自車両の加減速プロファイルを送信し、通信障害が発生している場合には自車両の位置情報のみを送信する構成とする。これにより、通信性能が低下した場合にあっても通信量を減らして通信性能を確保することができる。そのため、受信側の制御車両は、受信した情報に基づいて自車両と他車両との相対位置関係を制御することができる。
(もっと読む)
稼動体の異常検出方法及び異常検出システム
【課題】外部からの影響によって異常程度の進展や監視信号が変化する場合でも、異常程度の進展を的確に捉えることができ、外部からの影響を排除して異常検出を精度よく行える稼動体の異常検出方法及び異常検出システムを提供する。
【解決手段】稼動体1のデータを継続して収集し、稼動体1のイベントを検出し、上記イベントで区切られた所定期間内に収集される上記データを対象データとして抽出し、あらかじめ異常検出のための比較用データを用意しておき、上記対象データと上記比較用データとを比較し、その比較結果に基づいて稼動体1の異常を検出する。
(もっと読む)
車両監査装置およびそれを用いた車両制御システム
【課題】制御対象に対する機能ドメイン制御手段による挙動制御の正当性を正しく判定し、機能ドメイン制御手段の冗長系の複雑化を防止する車両監査装置およびそれを用いた車両制御システムを提供する。
【解決手段】イントラボックス100は、タイヤ70の挙動を制御するステアリング制御装置30およびブレーキ制御装置40とは独立して設置されている。イントラボックス100の挙動情報取得手段210は、各種センサの検出信号等から車両の実際の挙動情報を取得する。監査手段240は、車両の実挙動情報に基づいて、ステアリング制御装置30およびブレーキ制御装置40のタイヤ70に対する挙動制御の正当性を判定する。ステアリング制御装置30およびブレーキ制御装置40による挙動制御が異常の場合、監査手段240は、車両の挙動異常を解消するように、ステアリング制御装置30およびブレーキ制御装置40に対して挙動制御の指令値を出す。
(もっと読む)
車両の制御量設定装置
【課題】車両が長期にわたって使用されても、車両の運動制御を好適に実行させることができる車両の制御量設定装置を提供する。
【解決手段】制御量設定装置11を構成するECU16は、車両状態を数値的に表す車両状態値としてヨーレート偏差を検出する。また、ECU16は、車両の走行距離を車両特性値として読み出し、該走行距離が走行距離閾値よりも大きいか否かを判定する。そして、走行距離が走行距離閾値以下である場合、ECU16は、車両特性が未だ変化していないものと判断し、走行距離を加味することなく、ヨーレート偏差のみに基づき制御量を設定する。一方、走行距離が走行距離閾値よりも大きい場合、ECU16は、車両特性が変化してしまったものと判断し、ヨーレート偏差と走行距離とに基づき制御量を設定する。
(もっと読む)
車両の挙動制御装置
【課題】車両の挙動を変更可能なアクチュエータを自車両の現在位置の検出誤差等を考慮して適切な制御タイミングで作動させること。
【解決手段】サスペンションECUはステップS52にて自車両の検出現在位置と地図上の現在位置との一致精度を表す信頼度Sを計算する。ステップS54においては、信頼度Sと、ナビイベント開始地点と実際に路面凹凸部分が存在する地点まで距離Lsとの相関係数Rを計算する。そして、ステップS56にて相関係数Rが所定値R0以上であれば、ステップS57にて相関性を表す回帰直線Mを計算する。このように回帰直線Mを計算すると、次回以降同一のナビイベント開始地点を走行する際には、ステップS59において、信頼度Sと回帰直線Mとを用いて適切な延長距離L5を計算する。したがって、事前作動制御が適切に延長され、アクチュエータを適切な制御タイミングで作動させることができる。
(もっと読む)
1 - 10 / 13
[ Back to top ]