
国際特許分類[B62D121/00]の内容
国際特許分類[B62D121/00]に分類される特許
1 - 10 / 93
電動パワーステアリング装置
【課題】トルクセンサ、または電流センサの異常時においても、継続して安定したステアリング操作を行なうことのできる電動パワーステアリング装置を提供することにある。
【解決手段】ステアリングの操舵トルクを検出するトルクセンサと、操舵軸に加わる軸力を検出する軸力センサと、モータに流れる実電流を検出する電流センサとを備え、更に、トルクセンサ、軸力センサ及び電流センサの異常を検出する異常検出手段を有する。そして、上記異常検出手段により、軸力センサが正常、且つトルクセンサが異常の場合には、軸力センサにて、トルクセンサの値を推定する。また、軸力センサが正常、且つ電流センサが異常の場合には、軸力センサ及びトルクセンサにて、電流センサの値を推定することができる構成とした。
(もっと読む)
電動パワーステアリング装置

【課題】3相電動モータで1相に異常が発生したときに、操舵フィーリングを悪化させることなく、残りの2相を用いてモータ駆動を継続できる電動パワーステアリング装置を提供する。
【解決手段】異常検出手段で各相コイルのうちの1相の駆動系統に通電異常を検出したとき、異常時モータ指令値算出手段34で、操舵補助電流指令値Irefに基づいて残りの2相のコイルを使用する異常時相電流指令値を算出し、その異常時相電流指令値に基づいて3相電動モータ12を駆動する。その際、操舵トルク及び前記3相電動モータ12で発生する操舵補助トルクの和と外力との釣合い時に、前記異常時相電流指令値を低下させる電流指令値補正手段を備えている。
(もっと読む)
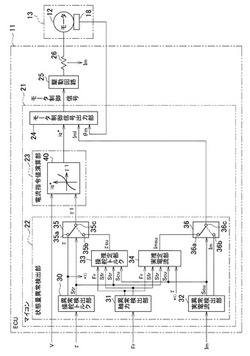
ステアバイワイヤの操舵反力制御装置
【課題】ステアリングホイールを中立位置から切り始めた際の良好な手応えを確保し、中立周りでの振動を防ぎつつ、手放し時における戻り位置を出来るだけ中立位置にするステアバイワイヤの操舵反力制御装置を提供する。
【解決手段】タイロッド間シャフト2と機械的に連結されていないステアリングホイール3に対し、操舵角センサ5と操舵反力モータ4とが設けられる。ステアリング制御手段12は、操舵角を基に、タイロッド間シャフト2を駆動する転舵機構6の転舵モータ7を制御する。ステアリング制御手段12に、操舵方向と転舵反力の方向とが異なる場合には正入力、同方向の場合には逆入力と判定し、この正逆に応じて操舵反力モータ4の操舵反力を制御する操舵反力制御部14を設ける。
(もっと読む)
車両用操舵制御装置
【課題】 運転者の意図しないステアリング操作を回避し、運転者に違和感を与えることのない車両用操舵制御装置を提供すること。
【解決手段】 運転者によって操舵されるステアリングの操舵状態に応じて操向輪を転舵する転舵手段と、ステアリングに操舵反力を付与する反力付与手段と、を備えた車両用操舵制御装置において、運転者の意図しない操舵操作が発生する状況を検出したときは、ステアリング操舵角の変化を抑制するように操舵反力を付与することとした。
(もっと読む)
車両用ステアリング装置
【課題】車両用ステア・バイ・ワイヤ式ステアリング装置において、ステアリングホイールの操舵角を容易に且つ確実に制限すること。
【解決手段】ステアリングホイール21に対して、転舵機構30を機械的に分離するとともに電気的には接続した車両用ステアリング装置10であり、ステアリングホイールに連結された第1回転軸41と、転舵機構に連結された第2回転軸42と、これら第1・第2回転軸同士を一定の相対的な回転角の範囲で互いに空転可能に連結する連結機構43とを有している。
(もっと読む)
路面摩擦係数推定装置
【課題】いかなる車両の運動状態においても、重み付け等の複雑な処理を加えることなく、路面摩擦係数を連続的に自然な値で精度良く推定する。
【解決手段】実際に生じている推定ラック推力Fr_star、推定車輪制駆動力Fx_star、推定横力Fy_starを算出し、タイヤの縦ひずみと横ひずみを表現するパラメータλと路面摩擦係数μとをパラメータとして含むタイヤのブラッシュモデルにより基準ラック推力Fr_model、基準車輪制駆動力Fx_model、基準横力Fy_modelを算出し、推定ラック推力Fr_starと基準ラック推力Fr_modelとの偏差と推定車輪制駆動力Fx_starと基準車輪制駆動力Fx_modelとの偏差と推定横力Fy_starと基準横力Fy_modelとの偏差が最小となるように路面摩擦係数μの値を最適化計算により求める。
(もっと読む)
パワーステアリング機構
【課題】エンジンに直結された油圧ポンプにおける無駄な動力を削減することが出来て、車両の既存部品を生かして後付けが可能なパワーステアリング機構の提供。
【解決手段】油圧ポンプの吐出口(2o)と吸入口(2i)とを連通するバイパスライン(Lb)を有し、該バイパスライン(Lb)には流量調整弁(16)が介装されており、該流量調整弁(16)には制御装置(20)から開閉制御信号が入力され、制御装置(20)は、操舵角度センサ(18)が計測したステアリングの操作量と、操舵力センサ(19)で計測したパワーシリンダ(3)或いはナックルアーム(11)に作用する力とに基づいて、前記流量調整弁(16)を開閉制御する機能を有している。
(もっと読む)
同時クランプによって車輪グリップ係数を求める方法
本発明は、所与の路面上を走行している車両の車輪のグリップ状態を表す特性値を求める方法であって、次のステップを有し、即ち、車両の同一アクスルの2本の車輪に所与の同時旋回角変化を与えるステップを有し、旋回角変化は、2本の車輪について等しい大きさを有するが互いに逆方向であり、2本の車輪のうちの少なくとも1本について上記特性量を測定するステップを有することを特徴とする方法に関する。 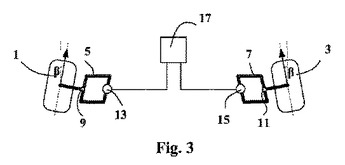 (もっと読む)
(もっと読む)
車線維持支援装置及び車線維持支援方法
【課題】運転者の意図する走行ラインとのずれからくる違和感を低減しつつ、走行車線逸脱を有効に防止することが可能な車線維持支援装置を提供する。
【解決手段】自車両が走行する走行車線Lの幅方向中央からそれぞれ幅方向左右に横変位基準位置LXL、LXRを設ける。そして、少なくとも左右の横変位基準位置LXL、LXR以内に自車両が位置する場合、ヨー角偏差が小さくなるように自車両をフィードバック制御する。また、走行車線中央に対し左右の横変位基準位置LXL、LXRよりも外に自車両がいる場合、上記角度偏差および横変位偏差が小さくなるようにフィードバック制御する。角度偏差及び横方向偏差の少なくとも一方の偏差に応じて、相対的に前輪の転舵方向に対する後輪の転舵方向の位相を制御する。
(もっと読む)
車両用運動制御装置
【課題】発生ヨーモーメントの低下を補うためのヨー発生装置の制御手段が、他の転舵制御手段と協調して作動する制御装置を提供する。
【解決手段】本発明に係る車両用運動制御装置は、操舵車輪の転舵角を変更可能な操舵アクチュエータ22を備えた車両に搭載されている。目標転舵角設定手段12,41と、実転舵角検出手段18と、実転舵角を目標転舵角に一致させるように操舵アクチュエータ22を駆動制御する第1の転舵制御手段41と、第1の転舵手段41の介入度に応じてヨー発生装置24を駆動制御する第2の転舵制御手段42,50とを備える。
(もっと読む)
1 - 10 / 93
[ Back to top ]