
国際特許分類[B62D123/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 車両設備のための流体圧力供給,例.動力駆動操向装置用;圧力発生,圧力消滅またはそれらの限界値;潤滑または他の流体の容量 (30)
国際特許分類[B62D123/00]に分類される特許
1 - 10 / 30
パワーステアリング装置
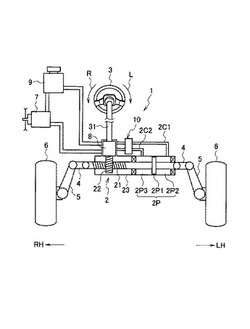
【課題】簡単な構造でシミーを効率的に抑制することができるパワーステアリング装置を提供する。
【解決手段】パワーアシストバルブ8とパワーシリンダ2Pとを連通した2本のシリンダ配管2C1、2C2の途中に2連式開閉バルブ10を設ける。2連式開閉バルブ10は、第1シリンダ配管2C1と第2シリンダ配管2C2とに跨がって取り付け、両シリンダ配管2C1、2C2を同時に開閉する簡単な構造となる。ハンドル3が中立状態で制御油圧が発生されない状態での高速走行時に、第1、第2シリンダ配管2C1、2C2を二連式開閉バルブ10で遮断し、パワーシリンダ2Pの第1、第2油室2P2、2P3内の作動油を封じ込めてラック21をロック状態とする。これにより、操舵輪6に入力された路面振動がハンドル3に伝わってシミーとなるのを抑える。
(もっと読む)
電動ポンプ装置

【課題】起動してから素早く必要な油圧を発生させることができるとともに、安定して油圧を供給することのできる電動ポンプ装置を提供する。
【解決手段】マイコン22は、モータ13の回転状態を維持することにより必要な油圧が変速機構に供給される安定状態であるか否かを判定し、安定状態である場合に電流フィードバック制御のゲインKを、起動状態で設定される高応答ゲインよりも小さな低応答ゲインに変更するPIゲイン設定部51を備えた。
(もっと読む)
走行路逸脱防止装置及びそれを備えた車両
【課題】走行路逸脱防止制御において、運転者の操作意図がない状態で車両の走行路逸脱を防止するためアクチュエータが作動した場合に、運転者の操作意図があると誤判断して逸脱防止制御が中断することを防止すること。
【解決手段】各センサやカメラ等の検出手段の結果に基づいて走行路外への逸脱防止制御を行う逸脱防止制御手段と、運転者の操舵意図を判定する運転意思判定手段と、運転意思判定手段からの運転者の操舵意図に基づいてアクチュエータの作動を規制するアクチュエータ作動規制手段とを有し、運転意思判定手段は、検知した操舵トルクの変化量ΔTh及び操舵アクチュエータへの制御指令値の変化量ΔTsとを算出し|ΔTh|−|ΔTs|が閾値以上の場合に運転者の操作意図があると判断して逸脱防止制御の作動を制限する。
(もっと読む)
パワーステアリング機構
【課題】エンジンに直結された油圧ポンプにおける無駄な動力を削減することが出来て、車両の既存部品を生かして後付けが可能なパワーステアリング機構の提供。
【解決手段】油圧ポンプの吐出口(2o)と吸入口(2i)とを連通するバイパスライン(Lb)を有し、該バイパスライン(Lb)には流量調整弁(16)が介装されており、該流量調整弁(16)には制御装置(20)から開閉制御信号が入力され、制御装置(20)は、操舵角度センサ(18)が計測したステアリングの操作量と、操舵力センサ(19)で計測したパワーシリンダ(3)或いはナックルアーム(11)に作用する力とに基づいて、前記流量調整弁(16)を開閉制御する機能を有している。
(もっと読む)
車両挙動制御装置
【課題】 運動状態検出センサの故障時等における車両挙動の乱れを抑制した車両挙動制御装置を提供する。
【解決手段】 ヨーレイトFB値設定制御を開始すると、ATTS−ECU16は、ステップS21で実ヨーレイトγrealと規範ヨーレイトγrefとの差Δγを算出する。次に、ATTS−ECU16は、差Δγの絶対値|Δγ|に基づき、ステップS22でヨーレイト差−ゲインマップからヨーレイト制御ゲインGyを検索/設定する。次に、ATTS−ECU16は、ステップS23で実ヨーレイトγrealと規範ヨーレイトγrefとに基づきヨーレイトFBベース値YRbaseを設定した後、ステップS24でYRbaseにヨーレイト制御ゲインGyを乗じることによってヨーレイトFB値YRfbを設定/出力する。
(もっと読む)
操舵制御装置
【課題】モータのロック位置によって各相のスイッチング素子への通電量が大きく変わる場合でも、推定温度の最大値に基づいて適切な過熱保護を行えるようにした操舵制御装置を提供する。
【解決手段】操舵トルクを検出するトルクセンサと、アシストトルク付与のためのブラシレスモータ18と、アシストトルク指令値を求めるアシストトルク算出部26と、スイッチング回路を含むモータ駆動部30と、モータ18の相電流を検出する電流センサ31と、過熱保護演算部25とを備える。過熱保護演算部25では、電流センサ31からの相電流値の絶対値の最大値に基づいてモータ18の温度変化量を推定する。その温度変化量に応じたトルク補正量を算出し、このトルク補正量をもってアシストトルク指令値を補正する。
(もっと読む)
車両用走行支援装置および車両用走行支援方法
【課題】障害物との接触を回避する操舵制御を行う場合に、運転者に違和感が生じる事態を低減すること。
【解決手段】操舵回避能力が設定された閾値より低い場合に、障害物との接触回避のための操舵制御を抑制する(図10の区間B)。このため、操舵回避能力が設定閾値より低くなり、操舵制御による障害物との接触回避効果が低下した場合に、その操舵制御を抑制できる。この結果、操舵制御が行われている場合であっても、運転者が操舵操作を行った際、違和感を生じる事態を低減することができる。
(もっと読む)
パワーステアリング装置
【課題】省エネルギーを達成できる上に、操舵者にひっかかり感を与える可能性がなくて、スムーズにフィリング良く操舵を行うことができるパワーステアリング装置を提供すること。
【解決手段】コントロールバルブ15は、中立位置S0で、ポンプポートPを第1負荷ポートAおよび第2負荷ポートBに連通させる一方、タンクポートTを閉鎖する。したがって、操舵輪1の切り返し時、パワーシリンダ6の第1室CAまたは第2室CBが瞬間的にタンク32に連通することがなくて、パワーシリンダ6がスムーズに作動して、操舵者にいわゆるひっかかり感を与えることがない。圧力指令が、流動損失に関連する圧力補償値で補正されているから、寒冷時に操舵が重くなる恐れがない。
(もっと読む)
パワーステアリング装置
【課題】省エネルギーを達成することができる上に、冬場などの気温の低いときでも、パワーシリンダのアシスト力が小さくなることがなくて、操舵者の操舵力が増加することがなくて、操舵感がよいパワーステアリング装置を提供すること。
【解決手段】制御装置50は、油温センサ41から受けた作動油の温度を表す信号に基づいて、作動油の温度の低下に応じて大きくなる圧力補償値を作成する。この圧力補償値は、作動油の粘度に起因する流動圧力損失に対応する値である。パワーシリンダ6の第1室CAの圧力CAPと、第2室CBの圧力CBPとの差圧の絶対値ABS(CAP−CBP)と、圧力補償値とを加算して、圧力指令を作成する。このように、粘度の増大に起因する流動圧力損失を圧力補償値で補償して、圧力指令を作成するので、寒冷時などに、操舵感が重くなることがない。
(もっと読む)
パワーステアリング装置
【課題】省エネルギーを達成することができる上に、冬場などの気温の低いときでも、パワーシリンダのアシスト力が小さくなることがなくて、操舵者の操舵力が増加することがなくて、操舵感がよいパワーステアリング装置を提供すること。
【解決手段】制御装置50は、油温センサ41から受けた作動油の温度を表す信号に基づいて、作動油の温度の低下に応じて大きくなる圧力補償値を作成する。この圧力補償値は、作動油の粘度に起因する流動圧力損失に対応する値である。パワーシリンダ6の第1室CAの圧力CAPと、第2室CBの圧力CBPとの差圧の絶対値ABS(CAP−CBP)と、圧力補償値とを加算して、圧力指令を作成する。このように、粘度の増大に起因する流動圧力損失を圧力補償値で補償して、圧力指令を作成するので、寒冷時などに、操舵感が重くなることがない。
(もっと読む)
1 - 10 / 30
[ Back to top ]