
国際特許分類[B62D61/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自動車;付随車 (46,083) | 車輪の配列または数に特徴のある自動車または付随車であって,他に分類されないもの,例.4つの車輪を菱形に配列したもの (113)
国際特許分類[B62D61/00]の下位に属する分類
車両の縦中心線に沿って縦に並んだ二つの路面車輪を持つもの (14)
三車輪を持つもの (11)
四車輪以上持つもの (41)
数を変更自在の接地車輪を持つもの,例.他の車輪より高所に配設された数個の車輪を持つもの,または出没自在の車輪を持つもの (32)
国際特許分類[B62D61/00]に分類される特許
1 - 10 / 15
車体傾動抑制システム
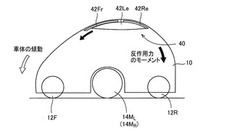
【課題】車体の姿勢を安定させるために、車体の傾動を抑制するためのシステムとして実用的な車体傾動抑制システムを提供する。
【解決手段】(A)車体に保持されて設定方向に移動可能とされた質量体と、(B)車体に支持されて質量体を動かすアクチュエータと、(C)そのアクチュエータを制御する制御装置とを備えさせ、車体の傾動によって設定方向の傾きが生じる際に、アクチュエータを制御して、質量体にそれを設定方向に動かす力を付与することで、その傾きを打ち消す方向の力を車体に作用させ、車体の設定方向の傾きを抑制するように構成する。
(もっと読む)
無方向性ロボット

【課題】 人間に代わって悪環境下での移動・複雑な作業を行うために利用される無方向ロボットを提供する。
【解決手段】 サーボモータを二個用いた二自由度のアームによって任意の方向に重りを移動させ、進行方向に重心位置をずらして任意の方向に進む手段と、対面する頂点に駆動輪とキャスタを持ち、全ての面が同様の移動機構を持ち、各面に二つの駆動輪で旋回と移動を行い、箱の内部に姿勢認識装置を組み込んで、機体の姿勢が変化する際に転がり重さによってセンサーの認識した方向の面を接地面として対応した動輪を回転させる手段と、三角錐全ての頂点に動輪を配置し、車輪方向へ回転するローラを8個備えた特殊なホイールを使用しており、ホイールを各面に3個配置されてその駆動輪のベクトルの合力を任意の進行方向に向ける全方向移動を行う手段、を備える。
(もっと読む)
車両運動制御システム
【課題】単一の前輪とその前輪より車両後方側に配設された左輪および右輪とを有する車両に搭載されて車両の運動を制御するシステムの実用性を向上させる。
【解決手段】前輪12Fの車体10に対する平面視における位置を変更する前輪位置変更装置84Fを備え、その前輪位置変更装置84Fを制御するために制御装置が有する制御部を、車両の旋回時において、前輪12Fを、車両が直進する際の位置である直進時前輪位置から旋回外側に移動させるように構成する。本車両運動制御システムによれば、車両の旋回時に、前輪12Fの車体10に対する位置を旋回外側に変更することで、車両の斜め前方への転倒を防止することが可能となる。
(もっと読む)
車両用ステアリングシステム
【課題】単一の前輪とその前輪より車両後方側に配設された左右輪とを有する車両の実用性を向上させるための車両用ステアリングシステムを提供することを課題とする。
【解決手段】(A)前輪12Fを回転可能に保持する前輪保持具と、(B)上下方向に延び、下端部において前輪保持具に固定され、その下端部より上方に設けられた被支持部52において車体46に支持された転舵軸56と、(C)その転舵軸56をそれの軸線回りに回転させることで前輪12Fを転舵させる前輪転舵装置54と、(D)転舵軸56をそれの被支持部52を支点に動かすことで、平面視において前輪12Fの車体に対する位置を変更する前輪位置変更装置80とを備えさせる。車両の旋回時において、前輪12Fを旋回外側に移動させるとともに、前輪12Fをそれの上方が旋回内側に向かうように傾倒させ、車両の転倒を防止することが可能である。
(もっと読む)
倒立振子型四輪走行装置
【課題】前後進及びそのままの位置で旋回、車体の方向を変えずに横方向に移動可能であり、前後進時及び横方向移動時に段差があっても十分な段差乗り越え力を備えている、倒立振子型四輪走行装置を提供する。
【解決手段】全方向車輪の第1〜第4の車輪10a〜10dを、各車輪の接地点が同一直線上に順に並ぶ配置で装置フレーム20に支持し、装置フレーム20を第1〜第4の車輪の車軸線を回転中心として揺動する倒立振子型に備え、第1の車輪と第2の車輪及び第3の車輪と第4の車輪について、平面視において一端側を近接し他端側を開き、第2の車輪と第3の車輪が、平面視において他端側を近接し一端側を開く。第1〜第4の車輪に駆動モータ15a〜15dを備え、装置フレーム20の倒れ角を検出する倒れ角センサ41の信号を入力して倒立振子型の制御モデルに基づき駆動モータを制御するコントローラ40を備えた。
(もっと読む)
無人搬送車用台車及び無人搬送車
【課題】その場旋回やカニ歩き等の細かい動作が可能な無人搬送車用台車及び無人搬送車を提供する。
【解決手段】車体2と、車体2上に設けた積載部3と、車体2底部の対角位置に設けた全方向移動車輪4aと駆動部5とからなる無人搬送車用台車1であって、全方向移動車輪4aは、ホイール41と、ホイール41の周囲に配列されホイール41の回転方向に対して直交する横方向へ自在に回転する複数個の分割タイヤ42と、からなり、分割タイヤ42は、内周部の直径が外周部の直径よりも小さく、ホイール41の周面に車輪外周円の円弧を形成するように配置されている。
(もっと読む)
回転体付き車輪及びそれを備えた全方向移動車輌
【課題】屋外の段差などを有する場所では強力な走破性を発揮する、回転体付き車輪を提供する。
【解決手段】仮想の第1垂直面内の仮想の第1の円C1と外形が同形のホイールと、第1の円C1に沿って複数の回転体62を車軸21,31と直交する第1回転軸63まわりに回転可能にホイールの外周縁部に配設した回転体付き車輪60であって、第1垂直面から距離を置いて第1垂直面と対向する仮想の第2垂直面内で第1の円C1よりも半径の小さい仮想の第2の円C2に沿って配設した複数の段差用補助輪65を備え、第2の円C2の中心は第1の円C1の中心を通る仮想の水平線上に設定されていて、複数の段差用補助輪65は車軸21,31と直交する第2回転軸まわりに配設されている。
(もっと読む)
移動台車
【課題】台車本体の姿勢を任意の姿勢角に保ちつつ、この台車本体が接床面上で任意の方向に移動することが可能な移動台車を提供する。
【解決手段】台車本体2と、この台車本体2にこの台車本体2を床面に対して任意の高さに保持するように一端が台車本体2に関節軸を介して枢着された4個の脚部3と、これらの脚部3の他端に設けられ、車輪部8およびこの車輪部8周囲に回転可能に設けられた複数の小回転体10からなる4個の全方向移動用車輪4と、台車本体2および脚部3の一端間に設けられた関節軸を回動駆動して脚部3の枢着角度を変化させる複数の回転駆動手段5と、を備え、関節軸周りの回転ベクトル、および複数の小回転体10のうち、床面に接地している小回転体10の回転ベクトルとがほぼ平行に配置されている。
(もっと読む)
可変構成自動車
【課題】
現在の一般的な乗用車は数人乗車可能で高速走行、長距離走行の能力を有しているが、実際の使い方はその保有能力の一部活用の走行移動が殆どである。例えば一人乗車での走行移動の場合には、他の四人乗車分に関連する車体部分の重量は引き摺って走行していることになり、余分の多くのエネルギーを消費している。
旅客輸送量データからも平均乗車人数が1.358人であり、殆どの走行時において一人が移動するのに、1トン前後の重量を引きずって移動していることになり、エネルギー効率が極めて悪い移動手段である。
【解決手段】
乗用車システムを原点に立ち返って見直し、最小限の乗用車両と走行移動能力付加車両を組み合わせて一体構成が可能な可変構成自動車であって、走行移動方法と乗車人数に応じて最適な必要最小限な車両構成とする。
(もっと読む)
自動車
【課題】 運転席が設けられたケース体の両側にほぼV字状に配置した左右の車輪で、運転時の視界を妨げられることなく、オートバイのように走行できるとともに、転倒することなく、安全で注目を集めることができる自動車を得る。
【解決手段】 ほぼV字状に左右の車輪が回転可能に取付けられるように両側部位に左右の車輪取付体が形成され、内部に運転者が該車輪取付体に形成された足出し孔より外に出して座ることができる運転席を有するケース体と、このケース体の左右の車輪取付体に回転可能に取付けられた左右の車輪と、この左右の車輪を回転駆動させる前記ケース体に取付けられた駆動装置と、前記ケース体の下部寄りの中央部に前後方向に位置調整可能に取付けられた両端部にローラが取付けられた位置制御装置と、前記運転席に座った運転者が操作できるように、前記ケース体内に取付けられた前記左右の車輪の回転速度を制御できるハンドルとで自動車を構成する。
(もっと読む)
1 - 10 / 15
[ Back to top ]