
国際特許分類[B62D63/00]の内容
国際特許分類[B62D63/00]の下位に属する分類
国際特許分類[B62D63/00]に分類される特許
1 - 10 / 12
全方向移動車両
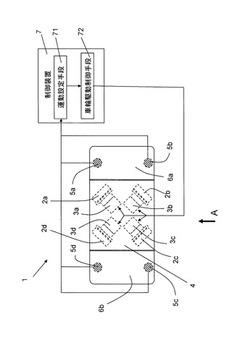
【課題】全方向への移動走行と自転運動の組合せで構成される多種類の運動を、荷重センサの出力に基づき操作できる全方向移動車両を提供する。
【解決手段】荷重センサ5a、5b、5c、5dの方向と出力値により決まるベクトルを指令値として送出する操作手段と、全方向移動車両1の運動を設定する運動設定手段71と、運動設定手段71により設定された運動をさせるべくオムニローラ2a、2b、2c,2dに動作指令を出力する車輪駆動制御手段72とを備える。運動設定手段71が、指令値の総計である総計指令値により運動方向と運動速度の少なくも1方を設定し、複数の所定の指令値の合計である所定合計指令値を用いて運動の種類を設定する。
(もっと読む)
運転席方向可変車両の制動装置

【課題】運転席方向可変車両の運転方向が何れ方向であっても、前後輪制動力配分が、後輪先ロック防止と、十分な車両減速度の発生とを両立させ得るものになるようにする。
【解決手段】S21で、ブレーキペダル踏み込み量Lbおよび運転席の向きを検出し、S22で、運転席の向きに応じた理想制動力配分特性に基づき目標前後制動力配分を算出する。S24で車体の走行方向一方側(A側)が車両前方となる運転方向であると判定するとき、S25において制動力配分を、S22で求めた目標制動力配分となすよう、つまりA側車輪(前輪)の制動力の方が反対側B側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。S24でB側が車両前方となる運転方向であると判定するとき、S26において制動力配分を、S22で求めた目標制動力配分となすよう、つまりB側車輪(前輪)の制動力の方がA側車輪(後輪)の制動力よりも大きくなるように制動力を制御する。
(もっと読む)
搬送台車、搬送装置及び搬送方法
【課題】中量物や重量物を搬送する搬送台車において、小型化を妨げることなく、各車輪にかかる偏荷重を抑制して耐久性を向上させること。
【解決手段】搬送対象物が載置される台座5とこの台座5を支持する走行台車3とを備え、走行台車3は、フレーム9に支持された同軸の2つの回転軸21a,21bに、回転可能に設けられた2つの車輪7a,7bと、フレーム9に支持され2つの車輪を独立に回転させる駆動装置と、車輪の回転軸と直交する方向の水平軸回りに揺動可能にフレームに支持される支持部材47とを有し、2つの車輪7a,7bは、支持部材47の両側に設けられ、支持部材47は、台座5の台座面と直交する軸回りに台座を回動可能に支持する軸受51を介して垂下して設けられること。
(もっと読む)
搬送装置の制御装置
【課題】搬送装置を構成する複数の搬送台車の走行を協調させて制御する。
【解決手段】一対の車輪をそれぞれ駆動する一対のモータを有してなる搬送台車を、前後左右に複数並べて配置して重量物を搬送する搬送装置の制御装置を、各搬送台車を制御する複数の子コントローラと、各子コントローラを統括制御する親コントローラにより構成し、親コントローラは搬送装置の原点座標と各搬送台車の台車座標を記憶しておき、旋回走行等の制御モード指令に応答して、各搬送台車の操舵角を演算して操舵角指令値及び各搬送台車の台車座標における速度指令値を演算して子コントローラに出力し、子コントローラは操舵角指令値に基づいて自己の一対の車輪を互いに正逆方向に回転させて操舵角を制御し、速度指令値に基づいてそれぞれ自己の一対の車輪の回転速度をそれぞれ制御することを特徴とする。
(もっと読む)
三輪走行装置
【課題】前後方向だけでなく、横へも移動可能にした、三輪走行装置を提供する。
【解決手段】車軸が同一直線上に配置された第1車輪110及び第2車輪120と、第1車輪と第2車輪との間に配置され車軸が第1車輪及び第2車輪の車軸の延長線と直交する水平な直線上に配置された第3車輪130と、第1車輪,第2車輪及び第3車輪を別々に駆動するように各車輪に設けられた駆動手段と、各駆動手段を制御する制御手段と、を備え、各車輪110〜130が車輪外周に沿って並んで配置された複数の回転体31を備えている。
(もっと読む)
倒立車輪型移動体、及びその制御方法
【課題】転倒時の衝撃を低減することができる倒立車両型移動体、及びその制御方法を提供する。
【解決手段】本発明にかかる倒立車輪型移動体であって、車輪を回転可能に支持する右車台17、左車台19と、右駆動輪18、左駆動輪20を回転駆動するモータ34、36と、右アーム14及び左アーム16を介して右車台17、左車台19に対して回動可能に支持された車体12と、右アーム14及び左アーム16に設けられ、移動体100の車高を変化させる下関節モータ65、95と、倒立車輪型移動体が異常状態となったときに出力されるフェール信号88に基づいて、下関節モータ65、95を制御して、車高を下げる制御部80とを、備えるものである。
(もっと読む)
車両
【課題】要求された旋回目標と実際の旋回限界を把握し、該旋回限界に対応した、より少ない制限量(旋回目標にできるだけ近い状態)で旋回する。
【解決手段】車両全体の重心位置を推定し、その重心位置に応じた限界横方向加速度alim(=aMin、aMax)を求め、搭乗者が要求する目標走行状態(V*、γ*)から求めた横方向加速度a*が、限界横方向加速度alimを超えない範囲で旋回走行を行う。すなわち、限界横方向加速度alimを超えない目標走行状態が搭乗者によって入力された場合には、その目標走行状態で旋回走行する。一方、限界横方向加速度alimを超える目標走行状態が入力された場合には、横方向加速度a*=限界横方向加速度alimとなるように、現実目標走行状態(V*〜、γ*〜)に制限する。これにより、旋回速度と旋回曲率を必要以上に制限しないので、車両の旋回性能を限界まで最大限利用することができる。
(もっと読む)
推進力発生装置連結機構
【課題】 推進力発生装置の連結型を、直列配置型、並列配置型、斜め配置型、上下配置型の全ての型に変化させることが可能な広い稼動範囲を有する連結機構を提供することを目的とする。
【解決手段】 推進力発生装置連結機構は、中央構造体,ヨー軸・ピッチ軸回り回転関節,内部リンク,ロール軸回り回転関節,外部リンクを有する。ヨー軸・ピッチ軸回り回転関節は二つあり、上記の中央構造体の両端に位置する。内部リンクは上記の回転関節にそれぞれ連結され、回転関節により上記中央構造体に対して角度を変える。ロール軸回り回転関節は、上記のそれぞれのリンクのヨー軸・ピッチ軸回り回転関節が結合していない側の一端に結合されている。外部リンクは、上記2つのロール軸回り回転関節に取り付けられている。
(もっと読む)
走行車両
【課題】 乗員搭載部を任意の姿勢に制御する走行車両を提供する。
【解決手段】 車体2と、車体2に回転可能に支持し、一軸上に配置された車輪5と、車体2に支持し乗員Mを搭載する乗員搭載部と、を有する走行車両1において、車体2の姿勢を検出する車体姿勢検出手段121,122と、車体姿勢検出手段121,122の検出した検出値により、車体姿勢を制御する車体姿勢制御手段120と、車体姿勢検出手段121,122の検出した検出値に対応して乗員搭載部3の姿勢を制御する乗員姿勢制御手段130と、を備えることを特徴とする。
(もっと読む)
全方向移動車輪および移動装置
【課題】各回転体の回転軸方向の位置によらず、横行する走行面上にある障害物の乗越え性能が高く、直進性を高めることができ、安定した動作が可能な全方向移動車輪および移動装置を提供する。
【解決手段】各回転体2が、回転軸を湾曲可能な可撓性および回転軸に垂直な方向に撓み抵抗性を有する強度異方性の構造体を有している。各回転体2は、ホイール3の外周をリング状に包囲するよう湾曲して、ホイール3に設けられている。各回転体2は、それぞれホイール3の回転軸に対する同一垂直面に沿った曲線の回転軸を中心として回転可能である。各回転体2は、その回転軸方向に圧縮されている。ブレーキ4が、各回転体2を選択的に固定または回転可能に、ホイール3に取り付けられている。
(もっと読む)
1 - 10 / 12
[ Back to top ]