
国際特許分類[B62K3/00]の内容
処理操作;運輸 (1,245,546) | 鉄道以外の路面車両 (62,921) | 自転車;自転車のフレーム;自転車操向装置;特に自転車用に適した乗手操作の制御装置;車軸懸架装置;サイドカー,前方に連結する車体,その他これに類するもの (4,474) | 二輪車 (384)
国際特許分類[B62K3/00]の下位に属する分類
フレーム (24)
二人乗用自転車 (4)
特に身体障害者用に適合するもの (5)
国際特許分類[B62K3/00]に分類される特許
1 - 10 / 351
倒立移動体及び角速度センサの出力値補正方法
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
倒立型移動体、その制御方法及びプログラム
【課題】急減速を行った場合でも限られた駆動力でその安全性を維持すること。
【解決手段】倒立型移動体は、倒立状態を維持しつつ、搭乗者が搭乗する搭乗部の傾斜に応じて所望の走行を行う。また、倒立型移動体は、搭乗部が後傾斜して減速する傾斜状態を水平な倒立安定状態に戻すための駆動トルクを算出するトルク算出手段と、搭乗部が後傾斜して減速する傾斜状態にあり、かつトルク算出手段により算出された駆動トルクが所定トルク以上である不安定状態にあるか否かを判定する判定手段と、判定手段により不安定状態と判定されたとき、車輪を停止する制御を行う制御手段と、を備えている。
(もっと読む)
同軸二輪車

【課題】制御装置に入力される振動等だけでなく、サポート部に入力される振動等を減衰することができる同軸二輪車を提供する。
【解決手段】本発明の一形態に係る同軸二輪車1は、車輪20(20L、20R)を支持する車体10と、車体10に連結され、サポート部50及び制御装置80を支持する本体部40と、を備え、車輪20(20L、20R)の駆動を制御することで倒立制御を行う同軸二輪車であって、車体10と本体部40との連結部に弾性体2が介在されている。
(もっと読む)
移動体制御装置、その制御方法及びプログラム
【課題】倒立型移動体の安全性を向上させる。
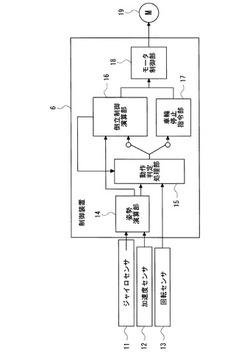
【解決手段】移動体制御装置110は、倒立型移動体の状態量を検出する状態検出手段123と、検出した状態量と駆動車輪410に生じる外乱トルク推定値と搭乗者の走行操作に応じ駆動車輪まわりに生じる操作トルク推定値と駆動車輪の駆動トルクとに基づき倒立型移動体の状態量及び搭乗者の姿勢角度のうち少なくとも1つを算出する状態推定手段131と、算出した状態量及び搭乗者の姿勢角度のうち少なくとも1つと駆動車輪の駆動トルクとに基づき外乱トルク推定値を算出する外乱トルク推定手段132と、算出した状態量及び搭乗者の姿勢角度のうち少なくとも1つに基づき操作トルク推定値を算出する操作トルク推定手段133と、外乱トルク推定値と操作トルク推定値と駆動車輪の駆動トルクとに基づき駆動車輪の外乱トルク及び操作トルクの組合せが不安定状態であるか否かを判定する状態判定手段と、を備える。
(もっと読む)
倒立型移動体、その制御方法及びプログラム
【課題】倒立型移動体の操作性を向上させること。
【解決手段】倒立型移動体1は、搭乗者の重心移動に応じて倒立状態を維持して走行する。倒立型移動体1は、搭乗者が把持し上下方向へ伸縮可能なハンドル2と、ハンドル2の伸縮動作をロック状態及びロック解除状態にする第1ロック手段と、倒立状態を維持しつつ所望の走行を行うように制御する通常制御モードと、倒立状態を維持しつつ目標位置に停まるように制御する位置制御モードと、を有する制御手段と、第1ロック手段のロック状態及びロック解除状態の切替えと、前記制御手段のモード切替えと、を連動して実行させる切替手段と、を備える。
(もっと読む)
倒立型移動体制御装置、及びその制御方法
【課題】倒立型移動体の安全性を向上させる。
【解決手段】倒立型移動体の状態量を検出する状態検出手段123と、操作情報に応じた操作指令値を算出する指令入力手段122と、倒立型移動体の状態量に基づいて搭乗者の姿勢状態を推定する状態推定手段131と、倒立型移動体の状態量と駆動手段に対するトルク指令値とに基づき走行状態を判定する判定手段132と、推定された搭乗者の姿勢状態と判定された走行状態とに基づき走行状態毎に状態量、姿勢状態及びトルク指令値を調整する際の優先順位を設定し、優先順位に応じて制御パラメータの重みを算出する重み演算手段133と、判定された走行状態と算出された操作指令値とに基づいて判定された走行状態毎に検出される状態量の目標値となる指令値を算出する指令演算手段134と、算出された操作指令値と指令値と制御パラメータの重みとに基づいてトルク指令値を算出するトルク指令演算手段135とを備える。
(もっと読む)
重心角推定方法及び同方法によって制御される倒立車輪型走行体
【課題】倒立車輪型走行体において、必要最小限のセンサを用いて、倒立状態及び補助輪接地状態の両状態における重心角(搭乗者や搭載物と倒立車輪型走行体との合成重心角)を推定する方法を提供する。
【解決手段】補助輪が接地せず駆動輪のみで倒立する倒立状態と補助輪が接地する補助輪接地状態とを有する搭乗可能な倒立車輪型走行体について、倒立状態及び補助輪接地状態の各運動方程式に基づいて状態オブザーバを設計し、補助輪接地状態の状態オブザーバの状態方程式にはアフィン項を導入し、倒立状態及び補助輪接地状態の各状態オブザーバを用いて、両状態での搭乗者又は搭載物に起因する倒立車輪型走行体全体の重心角の変動分及び外乱、及び補助輪接地状態での床反力を推定する。
(もっと読む)
移動体の制御方法及びプログラム
【課題】消費電力を低減することができる、移動体の制御方法を提供する。
【解決手段】本発明の一形態に係る移動体の制御方法は、多重系モータ33L、33Rの一つの系を制御する第1の制御系31又は32と、多重系モータ33L、33Rの他の一つの系を制御する第2の制御系32又は31とを備える倒立制御型の移動体の制御方法であって、移動体の状態に基づいて、移動体の倒立制御が可能で、且つ復帰時に必要な機能を残して、一方の制御系の機能をスリープ状態とする。
(もっと読む)
倒立二輪型車両、その動作方法、及びプログラム
【課題】倒立二輪型車両の動作特性を踏まえて、倒立二輪型車両のより快適な乗車を提供することが望まれている。
【解決手段】倒立二輪型車両100は、ピッチ方向(z軸に沿う方向)におけるハンドル部45のピッチ角速度の増加に応じて制限値が低減される条件にて、倒立二輪型車両100の移動速度が制限値以上であるか否かを判定し、当該判定結果に応じて、倒立二輪型車両100の搭乗者に対してハンドル部45の急操作の是正を促すべく報知動作する。例えば、倒立二輪型車両100は、警告音を発生する。
(もっと読む)
移動体
【課題】車両の操作感覚の犠牲を抑制しつつ、カント路上における移動体の走行状態を好適に確保すること。
【解決手段】倒立二輪型車両100は、一組の車輪(11、12)を回転制御して移動する移動体である。倒立二輪型車両100は、搭乗者によって操作されるハンドル部45と、搭乗者による操作に応じて姿勢変化したハンドル部45を初期姿勢へ復帰させるバネ56と、搭乗者による操作に応じて初期姿勢とは異なる第1姿勢へ変化したハンドル部45を、第1姿勢から初期姿勢までハンドル部45の姿勢が変化する過程の姿勢である中間姿勢まで、バネ56と共にハンドル部45を復帰させるバネ58と、を備える。更に、倒立二輪型車両100は、ハンドル部45が逆方向へ傾くことに対応するべく、バネ66、バネ68を有する。
(もっと読む)
1 - 10 / 351
[ Back to top ]