
国際特許分類[B63C11/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船の進水,牽引による運搬,乾ドックへの入出渠;水難救助;水中での生存または作業用の装置;水中の物の引上げまたは探索用の装置 (699) | 水中での生存用または作業用の装置;水中物探索装置 (361)
国際特許分類[B63C11/00]の下位に属する分類
潜水者用装置 (144)
底部に機械的連接部,例.ケーブル,を有する潜水室 (4)
潜水者用そり,水中走行具,すなわち潜水衣をきた潜水者が乗る水中走行具 (14)
水中物の探索装置 (79)
他に分類されない,水中作業に特に適用した工具 (8)
国際特許分類[B63C11/00]に分類される特許
1 - 10 / 112
潜水ビークル
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
潜水ビークル
【課題】潜水ビークルと、かかるビークルを操作する方法を提供する。
【解決手段】船体軸3を画定するとともに船体軸に沿って見た時に略環状を呈する外側船体2を有する潜水ビークル1であり、環状体の内部は、ビークルが液体に潜水する時に液体がダクト5を満たすように、両端部で開口したダクトを画定する。ビークルはさらに、船体軸を中心にビークルを転回させるための手段を含む。浮力制御システムが設けられ、外側船体は船体軸に対して後傾している。ビークルを出動および使用する様々な方法が記載される。
(もっと読む)
溶断装置

【課題】連結体によって固定された第1の物体と第2の物体の位置関係を解除する切離機構として利用可能で、固定作業が容易な溶断装置を提供する。
【解決手段】本発明の溶断装置1は、連結体3をスライド可能に通すためのチューブ状の連結体収納部5と、連結体収納部5の外側にコイル状に巻かれた電気ヒータ部7と、これらを収納するケース13とからなる溶断装置本体2と、電気ヒータ部7に電流を供給するための電源9と、電源9から電気ヒータ部7へ電流を流すスイッチ回路11とを備えている。連結体3によって第1の物体と第2の物体が固定されており、スイッチ回路11がオン状態になると、電源9から電気ヒータ部7に電流が流れ、連結体収納部5及び連結体収納部5を通る連結体3を溶断することで、第1の物体と第2の物体が切り離される。
(もっと読む)
水中移動型検査装置及び水中検査設備
【課題】 海底構造物等の検査対象物が航走体の質量に基づく力を受けて損傷することを防止できるようにすると共に、検査対象物の検査を含む各種作業の質の向上を図ること。
【解決手段】 航走しながら海底パイプライン(検査対象物)13を検査することができる水中移動型検査装置11であって、潜水して、海底パイプライン13に対して非接触状態で検査対象物を辿りながら航走する航走体14と、この航走体14に設けられている第1可動アーム部16と、この第1可動アーム部16に設けられ、海底パイプライン13を検査するための検査用ツール部17と、航走体14が、海底パイプライン13に対して非接触状態で辿りながら航走するときに、第1可動アーム部16を作動させて、検査用ツール部17が海底パイプライン13に対して所定の目標位置関係となるように、検査用ツール部17を移動させることができる制御部とを備える。
(もっと読む)
水中ロボット
【課題】無線による通信を実現することにより、単機能モジュールを独立ユニットに構成し、耐圧・耐水に優れて、各モジュールの交換が容易な水中ロボットを提供する。
【解決手段】少なくとも作業装置2bと制御装置7bを含む単機能モジュールを耐圧防水ケース2a,7aに格納した複数の独立ユニット2,7と、独立ユニット2,7を着脱可能に取り付けることができるシャシー5,6と、耐圧防水ケース2a,7aに穴を開けることなく、その外側に接触固定させる非導電性の伝達媒体10と、を有し、独立ユニット2,7は、通信手段2c,7cと、電池2d,7dを内蔵し、制御装置7bは、制御装置の独立ユニットの通信手段7cと、他の単機能モジュールを格納した独立ユニットの通信手段2cとを介して通信をし、他の単機能モジュールを制御して水中ロボットとしての全体の作動を制御する。
(もっと読む)
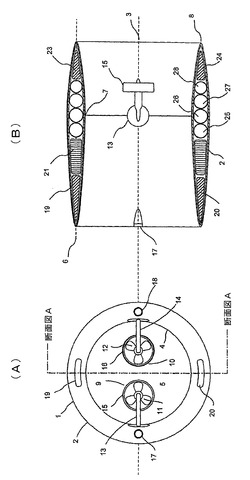
推進システム、推進システム形成方法及び推進システム動作方法
【課題】出力の切り替えが容易であり、かつ、多軸方向に沿った推進及び多軸周りの回転が可能な推進システム、推進システム形成方法及び推進システム動作方法を提供することを目的とする。
【解決手段】本発明に係る推進システムは、推進噴流を形成するポンプと、ポンプに結合され、水中推進装置の水中多軸制御を可能にするように構成された複数のコアンダ噴流装置34,36とを備える。ポンプは、可逆ポンプ32であり、ポンプの各出口にコアンダ噴流装置34,36が結合される。コアンダ噴流装置34,36によって、複数方向の並進及び複数の軸周りの回転が可能になる。
(もっと読む)
中層浮魚礁の回収方法及びそれに用いる回収具
【課題】複雑な操作を行うことなく、水中の係留索に簡便かつ確実に回収索を取り付けることができ、短時間で中層浮魚礁を回収することができる作業性、確実性に優れた中層浮魚礁の回収方法の提供。
【解決手段】中層浮魚礁の魚礁本体の外形よりも大きな環状に形成された係止部を魚礁本体の上方から外挿して魚礁本体と係留索の接続位置に保持する係止部保持工程と、係止部を縮径させて係留索の外周に巻着する係止部装着工程と、係止部を牽引して係留索と共に魚礁本体を水上に引き上げる回収工程と、を備えている。
(もっと読む)
水中航走体の着水揚収方法および水中航走体の着水揚収に用いる保持金具
【課題】水中航走体の着水、揚収作業において海象の影響を受け難く、かつ専用の運用支援船を必要としない水中航走体の着水揚収方法を提供する。
【解決手段】揚荷手段12を備えた運用支援船10を用いて、水中航走体40を運用支援船から海上へ着水させるため、または海上から運用支援船へ揚収するための方法であって、前記水中航走体の長手方向端部を保持して安定させるための保持金具60を前記揚荷手段に支持させる工程と、前記水中航走体の前記端部を前記保持金具に保持させて前記水中航走体を垂直に吊り上げる工程と、前記水中航走体を長手方向中心軸に沿った回転軸回りに回動させて着水方向あるいは荷役方向に着水面あるいは接地面を向ける工程と、前記揚荷手段を介して前記水中航走体を着水あるいは揚収する工程と、を有することを特徴とする。
(もっと読む)
水中航走体および障害物探知装置
【課題】海底の様子だけでなく、海面近くの状態も探知することの可能な障害物探知装置並びに該障害物探知装置を備えることにより、比較的浅い海域を円滑に航走することのできる水中航走体を提供することを目的とする。
【解決手段】水中航走体1に、送信ビームを送出機能を備えるとともに、送出した送波ビームが対象物によって反射された反射波を受信する受信機能を有する平面アレイ10を設ける。平面アレイ10の上方に設けられた素子11によって受信された反射波に基づいて上方受信信号が作成され、平面アレイ10の下方に設けられた素子11により受信された反射波に基づいて下方受信信号が作成される。処理部は、上方受信信号から上方受波ビームを算出するとともに、下方受信信号から下方受波ビームを算出し、算出した上方受波ビーム及び下方受波ビームから海底高度を算出する。
(もっと読む)
国の全額借金返済と都道府県市町村区の全額借金返済の為の多機能インプット全自動ロボットの著作権原本。コメント2008年8月30日AM1時16分11秒原本図面幾らかコピー取って眠る美馬牛カンキチ。2008年9月4日PM17時49分47秒多機能ロボット図面とロボット原本図を作り終えて、漸く再び書き始める美馬牛カンキチ。
【課題】従来のロボットは、全自動ロボットが無く、放射線処理など、危険作業には、向かないロボットしか無く、電気切れで止まってしまう欠点ばかりのロボットだけで有った。
【解決手段】人間の持ち得ている機能を、機械式にして、集合した無給式の超小型全自動発電ロボットの未来型ロボットに成り、危険な仕事を、従事する事によって、データー全自動インプットによって、ロボット知能の全自動進化によって、ロボットと人の共有社会を目指した著作権原本集合の人型ロボットの著作権原本。
(もっと読む)
1 - 10 / 112
[ Back to top ]