
国際特許分類[B63H25/00]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636)
国際特許分類[B63H25/00]の下位に属する分類
操舵のための入力装置 (110)
舵による操舵 (226)
推進器による操舵または動的停留;専用のプロペラによる操舵または動的停留;プロペラを備えた舵による操舵または動的停留 (243)
広げ得るフラップなどによる操舵または減速 (11)
ジェットによる操舵または動的停留 (20)
舵以外のものによってプロペラ後流を変向させることによる操舵または減速
他に分類されない減速手段 (1)
他に分類されない操舵用部品 (3)
国際特許分類[B63H25/00]に分類される特許
1 - 10 / 22
船舶の舵固定装置及び船舶の舵固定時の操船方法
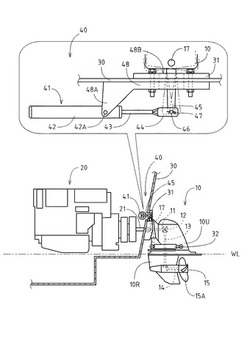
【課題】簡素な構成でありながら確実に操舵を固定できる船舶の舵固定装置を提供する。
【解決手段】船舶の船体30後部に配設されるアウトドライブ装置10と、前記アウトドライブ装置10から突出された操舵アーム45と、前記操舵アーム45に連結され、操舵ハンドルの操舵操作により作動する油圧シリンダ41とを備え、前記油圧シリンダ41を駆動できない非常時に、船体30と操舵アーム45を連結固定する舵固定装置であって、前記操舵アーム45を係合する係合部と、船体30に固定される固定部とを備える。
(もっと読む)
自動操舵制御装置、自動操舵装置、自動操舵制御プログラム、及び自動操舵制御方法

【課題】船体に対する風向を安定して制御することができる自動操舵制御装置を提供する。
【解決手段】自動操舵制御装置は、風向風速情報取得部と、針路制御部と、を備える。風向風速情報取得部は、相対風向θAを取得する。針路制御部は、相対風向θAを設定風向θSに一致させるように針路制御を行う。針路制御部は、第1モードと第2モードに切り替え可能である。針路制御部は、第1モードにおいては、当該第1モードの間に風向風速情報取得部が取得する相対風向θAを利用して針路制御を行う(ステップS103からS105)。また針路制御部は、第2モードにおいては、当該第2モードの開始時における前記相対風向θAを利用して針路制御を行う(S111からS113)。そして当該針路制御部は、設定風向θSの変更量に基づいて第1モードと第2モードを切り替える(S101)。
(もっと読む)
水平ドレーン埋設船の操船方法
【課題】簡易な設備で効率よく作業ができ、しかも操船性を向上させることができる水平ドレーン埋設船の操船方法を提供する。
【解決手段】軟弱地盤1中にドレーン材2を繰り出すためのマンドレル4を備えた水平ドレーン埋設船3を、牽引用ワイヤロープ7a,7bを使用した埋設船移動手段によって前記軟弱地盤1上を移動させる際に、水平ドレーン埋設船3の両舷側にそれぞれ前記軟弱地盤内に挿入可能な移動抵抗部材を備えておき、前記埋設船移動手段による水平ドレーン埋設船移動時に、軟弱地盤に対する移動抵抗を、前記両舷側の移動抵抗部材25間において違えることによって前記水平ドレーン埋設船1の移動方向を調整する。
(もっと読む)
船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置
【課題】補助推進装置の設置や舵の制御が不要で、目標位置を設定するだけで目標位置までの経路上に船体を漂流させる船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置を提供する。
【解決手段】船体は、船体用制御装置1とGPS航法装置2とクラッチ制御装置3とスパンカーとを備える。繰船者が目標位置を設定すると、現在位置から目標位置までの設定経路が算出され、船体と設定経路との離間距離が限界偏位量を超えた場合、クラッチ制御装置3がクラッチ4を嵌めて船体を推進させ、船体が設定経路上に復帰するとクラッチ制御装置3がクラッチ4を脱して船体を停止させる。
(もっと読む)
入射波の波高及び波向き推定方法、自動位置保持制御方法、自動位置保持システム及び船舶と洋上構造物
【課題】自動位置保持制御を行っている状態において、入射した波高と波向きを精度良く推定できる入射波の波高及び波向き推定方法を提供する。
【解決手段】船体位置及び船首方位を保持するための制御力及びこの制御力の方向と、船体に作用する波以外に起因する力及びこの力の作用方向の推定値とから、船体に作用した波漂流力の方向を算出し、この波漂流力の方向から、予め設定された波漂流力の方向と入射した波の波向きとの関係を示すデータを基に、入射した波の波向きを推定すると共に、計測されたピッチ運動と推定された波向きから入射した波の波高を推定する。
(もっと読む)
入射波の波高及び波向き推定方法、自動航路又は/及び船位維持制御方法、自動航路又は/及び船位維持制御システム及び船舶と洋上構造物
【課題】航路を指示航路に維持した自動航路維持制御又は/及び船体を指示位置に維持する船位維持制御を行っている状態において、入射波の波高と波向きを精度良く推定できる入射波の波高及び波向き推定方法を提供する。
【解決手段】航行中の航路維持又は/及び停船時の船位維持のための自動航路又は/及び船位維持制御方法で用いる入射波の波高及び波向き推定方法において、船体の相互に離間した3点以上の相対水位を測定しS101、該相対水位の測定値から入射波の波高S103と波向きS105を推定する。
(もっと読む)
入射波の波高及び波向き推定方法、自動航路又は/及び船位維持制御方法、自動航路又は/及び船位維持制御システム及び船舶と洋上構造物
【課題】航路を指示航路に維持した自動航路維持制御又は/及び船体を指示位置に維持する船位維持制御を行っている状態において、入射波の波高と波向きを精度良く推定できる入射波の波高及び波向き推定方法を提供する。
【解決手段】船体運動のピッチ運動とヨウ運動を測定しS101、測定したピッチ運動とヨウ運動の周期と振幅比と位相差から、予め設定されたピッチ運動とヨウ運動の周期と振幅比と位相差と入射波の波向きとの関係を示すデータD1を基に、入射波の波向きを推定すると共にS106、計測されたピッチ運動と推定された波向きから入射波の波高を推定するS108。
(もっと読む)
風圧力係数推定プログラム、風圧力係数推定装置および構造体の動作制御方法
【課題】 構造体の風圧力係数について、信頼性の高い風圧力係数を迅速に推定することができる一般的な推定方法を提供する。
【解決手段】 入力手段から入力された構造体の種類と構造体の代表値とを読み込む読込ステップS10、読み込まれた前記種類と前記代表値とに基づいて、風圧力係数推定式に入力する入力変数を統計的方法により推定する入力変数推定ステップS20、前記代表値と推定された前記入力変数を前記風圧力係数推定式に適用して、風圧力係数の推定結果を導出する風圧力係数導出ステップS30、導出された前記風圧力係数の推定結果を外部出力手段に出力する出力ステップS40をコンピュータに実行させる。
(もっと読む)
船舶用操縦装置
【課題】操舵装置を構成する何れかの機器に故障が生じた場合でも、故障していない他の機器を使用して船外機を操舵し、船舶を操縦可能な船舶用操縦装置を得る。
【解決手段】2機以上の船外機3L,Rが並置された船舶1に設けられる船舶用操縦装置であって、レバー位置検出部62L,Rで検出された、船外機のスロットル開度を調節するためのリモコン操作レバー61L,Rのレバー位置どうしの偏差を検出するレバー位置偏差検出部63と、船外機を操舵するためのハンドル5、ハンドルの操舵角を検出する操舵角検出手段または操舵角を伝送する通信線14に発生した故障を検出する故障検出手段とを備え、伝送された操舵角に基づいてアクチュエータ11L,Rを駆動する船外機操舵コントローラ12L,Rは、故障検出手段が故障の発生を検出した場合に、レバー位置偏差検出部で検出されたレバー位置偏差に基づいてアクチュエータを駆動する非常制御モードを有する。
(もっと読む)
起倒式スパンカー
【課題】強い横風に対し、操船不能や転覆の危険性がなく、帆の展開、収納が容易なスパンカーを提供する。
【解決手段】従来のスパンカーの帆面積と同等となるよう複数の羽根枚数とし、分割した面積を該羽根2a、2bの面積とすることで、横風の風圧による船舶への影響を軽減する。該羽根2a、2bそれぞれを主ピン3および自在支持軸6a,6b周りに回転し水平方向に収納することで、展開、収納が簡単になり、さらに、展開、収納、水平方向の角度調整を、電気、油圧、空気などの動力により駆動させることにより遠隔、自動化できる。
(もっと読む)
1 - 10 / 22
[ Back to top ]