
国際特許分類[B63H25/42]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 推進器による操舵または動的停留;専用のプロペラによる操舵または動的停留;プロペラを備えた舵による操舵または動的停留 (243)
国際特許分類[B63H25/42]に分類される特許
21 - 30 / 243
昇降式スラスタ装置
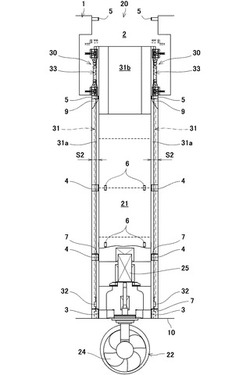
【課題】スラスタを沖合い稼動地点においても点検、補修が可能なように喫水面よりも上方まで引き上げることができるコンパクトな昇降装置を備えた昇降式スラスタ装置を提供する。
【解決手段】キャニスタ21の外面に設けた、上下方向に一定ピッチの歯部32を有する所要長さの一対のラック31と、各ラック31に沿って設けたガイド部材と、キャニスタ21を昇降路2内で昇降させる一対の昇降装置30とを備え、一対の昇降装置30は、ラック31の上下に離れた位置の歯部32に各々独立して嵌脱させる上下一対のキャッチと、各キャッチを具備した上下一対のフレームと、フレームの間に設けられた昇降シリンダ33とを有し、昇降シリンダ33は、昇降路側に固定した一方のフレームに対し、他方のフレームを前記ガイド部材をガイドとして昇降させるように構成されている。
(もっと読む)
垂直方向にオフセットした推進装置を備える船舶用操舵アセンブリ

【課題】垂直方向にオフセットした推進装置を備える船舶用の改良された操舵アセンブリを提供する。
【解決手段】アクチュエータ30は、シリンダ38と、そのシリンダ内に取り付けられピストンロッド軸に沿って往復運動するピストンロッド40と、シリンダの径方向外側に延出するペアの離間したシリンダ・アーム42,44と、そのシリンダ・アームの間に延在するピボットプレート46と、ピストンロッド軸100をチルトロッド軸105に対して平行に維持しながら、チルト軸に関してピストンロッドの円弧状の動きを可能にするように、ピストンロッドの両端に接続されチルト軸に関して枢動可能なペアの支持アーム52,54と、シリンダ上に配置され、タイバーをタイバー・マウント64,66に接続する接続部材を受けるために貫通して延びるアパーチャ68,70を有する。
(もっと読む)
多機掛け船舶推進機の制御装置
【課題】船舶推進機を多機掛けしている場合に、電動舵切り装置が故障し、舵が動かせなくなっても、操船者にアクセルレバーの煩雑な操作をさせることなく、ハンドルの操作のみで船を旋回させることができる多機掛け船舶推進機の制御装置を提供する。
【解決手段】各船外機5a、5bの運転情報を相互に送受信する通信線8を備え、船体を転舵させる電動舵切り装置7a、7bが故障したとき、操舵角を検出する操舵角センサ3の検出値に応じて各船外機5a、5bの推力を制御して推力差を与えるものにおいて、推力差により前記船体の走行方向を制御する際に、操舵角が小さい領域では前記推力差を与えない操舵角閾値で制御し、前記操舵角閾値を超えた場合に推力差を与える推力差所定値で制御する。
(もっと読む)
GPS信号による移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラム
【課題】スパンカーの操作や操船作業などを行うことなく、ボートの姿勢および位置を正確にコントロールできる新規な移動体制御装置、移動体制御方法、移動体制御プログラムおよびこれを用いた移動局管理システム、移動局管理方法、移動局管理プログラムの提供。
【解決手段】ボートBTなどの移動体に少なくとも2つ以上のGPS信号部A1、A2を備え、それらで検出されたボートBTの各位置測定点の位置を検出するようにしたため、その移動体の位置のみならずその移動体の姿勢(向き)も把握することができる。従って、これら2つ以上のGPS信号受信部A1、A2で測定される各位置測定点が常に所定の位置になるように移動体を制御すれば、スパンカーの操作や操船作業などを行うことなく、ボートBTの姿勢および位置を正確且つ容易にコントロールすることができる。
(もっと読む)
浮体およびその運転方法
【課題】浮体を簡素に構成して遠隔操作を可能とするとともに、浮体に搭乗する操作者がいなくても自力で水上移動を可能にする浮体を提供する。
【解決手段】浮体10は、水面に浮かされ連結可能な浮体ブロック41〜43と、この浮体ブロックに搭載され遠隔からの指令を受信する遠隔操作装置6と、この浮体を航走させるプロペラ63を有する複数の船外機50,60と、遠隔操作装置が受信した指令信号に基づいて複数の船外機を制御する制御部と、複数の船外機を旋回させる旋回機構58,68とを有する。複数の船外機は浮体ブロックの両端部に配置されており、制御部は旋回機構を用いて船外機を浮体ブロックに対して旋回させ、この旋回させた状態でプロペラを制御部が回転駆動することを可能にした。
(もっと読む)
船舶の電力制御方法及び船舶電力制御システム
【課題】スラスタ装置への給電を行っても需要電力が発電機の発電電力を超えるおそれを低減できる船舶の電力制御方法及び船舶電力制御システムを提供する。
【解決手段】船舶の電力制御方法は、発電機11,12,13と、空調装置38Xを含む電力を消費する複数の負荷機器と、船舶に横方向推進力を与えるスラスタ装置31と、を有する船舶の電力制御方法であって、船舶の離岸および接岸時に、空調装置の運転を抑制する。また、船舶電力制御システム1は、制御装置80がスラスタ装置の稼働を予測し、スラスタ装置の稼働前における消費電力計測手段44〜49の消費電力情報を初期基準として、スラスタ装置の稼働時におけるスラスタ装置の消費電力を含む複数の負荷機器の総消費電力を推定する演算を行い、スラスタ装置の稼働時における負荷機器の総消費電力が複数の発電機の総発電量内に収まるように空調装置を制御し、負荷機器の総消費電力を抑制する。
(もっと読む)
長さ調節可能な船舶エンジン用タイバー
【課題】特に塩水条件下で、腐食、及び/又は摩耗、破断によって、早期損傷を齎すことを解消できるタイバーを提供する。
【解決手段】タイバー36は、第1部分組立体114と第2部分組立体116を有する。第1部分組立体は、推進装置に連結するように構成した端部92と、該端部から延伸する第1管と、該端部に動作可能に連結し、第1管内に配置され、少なくとも部分的に第1管に沿って延伸するネジ部材160とを含む。第2部分組立体は、更なる推進装置と連結するように構成した端部90と、第2部分組立体の端部から延伸する第2管とを含む。第2部分組立体を、ネジ部材と螺合するように構成する。端部間の離間距離を該部材により選択的に調節可能にする。
(もっと読む)
アジマス推進器、この制御方法およびこれを備えた船舶
【課題】緊急停止の際に短時間で推進器を逆回転可能なアジマス推進器を提供することにある。
【解決手段】動力源5から駆動力が伝達される水平駆動軸8、駆動力の伝達方向を変換する船内傘歯車ユニット6、船内傘歯車ユニット6から駆動力が伝達される垂直駆動軸9、垂直駆動軸9からの駆動力の伝達方向を変換するボッド内傘歯車ユニット、ボッド内傘歯車ユニットから駆動力が伝達されるプロペラ軸11、それに接続される推進器3を備え、ボッド内傘歯車ユニットは、垂直駆動軸9の外周側と内周側が噛み合う二重筒10、二重筒10の外周側と内周側が噛み合う順回転用垂直傘歯車17aかつ逆回転用垂直傘歯車17c、どちらか一方の垂直傘歯車17a、17cの外周側と噛み合う推進軸用傘歯車17bを有し、駆動力を伝達する際には二重筒10が垂直方向に移動して垂直傘歯車17a、17cのいずれか1つと二重筒10とが噛み合うことを特徴とする。
(もっと読む)
アジマス推進器およびこれを備えた船舶
【課題】旋回時の舵角を小さくして、旋回による振動の発生を抑制することが可能なアジマス推進器およびこれを備えた船舶を提供することにある。
【解決手段】ポッド2と一体に設けられ、ポッド2の中心軸線に対して略直交する方向に長軸を有して延在する舵形状の舵板4と、ポッド2の端部に設けられ、舵板4の上流側に設けられる推進器3と、を備え、舵板4の下流側長辺には、舵板4の長軸方向に複数分割されて互いに独立に動作するフラップ5が設けられることを特徴とする。
(もっと読む)
船舶の操舵装置
【課題】船舶において船外機の転回位置を検出する転回角センサの異常を検出した場合、転舵不能にならず操船することができる操舵装置を提供する。
【解決手段】操船者が操舵方向を指示するハンドル1と、ハンドル1の操作角を検出する舵輪センサ2と、船外機4を転回させるアクチュエータ5と、アクチュエータ5による船外機の転回角を検出する転回角センサ6と、操作角に基づきアクチュエータ5を転回駆動する制御転回角を算出し、制御転回角と転回角との差異に従ってアクチュエータ5を転回駆動する制御装置8とを有し、制御装置8は、転回角センサ6の異常を検出した場合、制御転回角に応じて予め決められた所定時間、所定電流に基づき転回駆動を継続するものである。
(もっと読む)
21 - 30 / 243
[ Back to top ]