
国際特許分類[B63H25/42]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 推進器による操舵または動的停留;専用のプロペラによる操舵または動的停留;プロペラを備えた舵による操舵または動的停留 (243)
国際特許分類[B63H25/42]に分類される特許
31 - 40 / 243
船舶推進装置
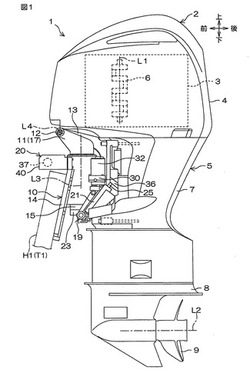
【課題】エネルギーのロスを低減できる船舶推進装置を提供すること。
【解決手段】船舶推進装置1は、トランサムブラケット10と、ステアリングシャフト11と、船外機2と、チルト機構19と、ステアリング機構20とを含む。ステアリングシャフト11は、トランサムブラケット10に連結されており、上下方向に延びるステアリング軸線L3まわりに回動可能である。船外機2は、ステアリングシャフト11に連結されており、チルト軸線L4まわりに回動可能であり、ステアリング軸線L3まわりにステアリングシャフト11と共に回動可能である。チルト機構19は、船外機2をステアリングシャフト11に対してチルト軸線L4まわりに回動させる。ステアリング機構20は、電動モータ37の動力をステアリング軸線L3まわりのステアリングシャフト11の回動に変換する動力変換機構を含む。
(もっと読む)
海洋構造物の運搬および設置用船舶並びに海洋構造物の運搬および設置方法

【課題】うねりおよび気象状況とは関係なく使用を可能にし、多数の海洋構造物が特定の時間内で運搬および設置を可能とする海洋構造物を運搬および設置する方法とその船舶を提供する。
【解決手段】海洋構造物を運搬および設置する船舶1.1であって、開口船尾12およびフロア3の後縁を超えて後部に伸びる側壁4.1,4.2に突起部9.1,9.2を備えたU形横断面を有する船体2と、フロアの下方の位置で垂直方向に移動可能な底端を有する甲板昇降式脚柱16.1、16.2、16.3、16.4を備えた船体2に組み込まれた甲板昇降式脚柱システム15.1、15.2、15.3、15.4と、側壁の上端で移動可能なクレーン20を備える。
(もっと読む)
船舶の操舵装置
【課題】 この発明は、船舶において船外機の転回位置を検出する転回角センサの異常を検出した場合、転舵不能にならず操船することができる操舵装置を提供する。
【解決手段】 操船者が操舵方向を指示するハンドル1と、ハンドル1の操作角を検出する舵輪センサ2と、複数の船外機4のそれぞれに設けられ船外機4を転回させる複数のアクチュエータ5と、複数のアクチュエータ5による船外機4の転回角を検出する転回角センサ6を複数配し、操作角に基づき複数のアクチュエータ5を転回駆動する制御転回角を算出し、この制御転回角と転回角との差異に従って複数のアクチュエータ5を転回駆動する制御装置8とを有し、制御装置8は、複数のアクチュエータ5を同調動作させるものであって、転回角センサ6の異常を検出した場合、正常な転回角センサ情報に基づき転回駆動を継続するとともに、転回角センサ6が正常な場合に比較し、駆動する転回角を制限する。
(もっと読む)
アジマス推進器
【課題】ラダー付きのアジマス推進器において、大きな舵角を取った場合等に発生するアジマス推進器全体の振動を抑制すること。
【解決手段】船内に設置した原動機5の動力を機械的に伝達し、ラダー形状部を含むストラットを介して船体に取り付けられたポッド2のプロペラ3を駆動するとともに、ストラットと一体にポッド2が回動するように構成されたアジマス推進器1Aにおいて、ストラットの内部に固有振動数を変化させる制振機構の錘20が設けられている。
(もっと読む)
無人の水中航走体および無人の水中航走体を運転するための方法
【課題】無人の水中航走体による水中範囲の調査に対する手間を減少させる。
【解決手段】無人の水中航走体1が、制御装置3によって、設定可能な制御情報に基づき制御可能である。無人の水中航走体1が、自律運転モードまたは遠隔操舵運転モードで選択的に制御可能であり、自律運転モードでは、制御装置3に、記憶素子13からの事前に求められた内的な制御情報が設定可能であり、遠隔操舵運転モードでは、制御装置3に、水中航走体1の通信装置11を介して外的な制御情報が設定可能である。
(もっと読む)
小型船舶
【課題】多機掛け船外機型の小型船舶において、旋回時にアクセルレバー操作を省略可能とし、速度などの走行状態に応じて各船外機の出力を調整し、ハンドル操作だけで容易に効率よく旋回できる小型船舶を提供する。
【解決手段】 ハンドル7と、該ハンドル7の操舵角を検出する操舵角センサ9と、船尾に取付けられた複数の船舶推進機3a,3bと、各船舶推進器に連結された電動舵切り装置15と、前記各船舶推進機3a,3bの出力を制御する制御装置12とを備えた小型船舶において、前記制御装置12は、前記操舵角及び船の走行状態に応じて、前記各船舶推進機3a,3bの推力を調整し、船舶推進機全体での推力及びその方向を制御するものであり、前記ステアリングホイールの回転操作による操舵角に応じて、前記各船舶推進機3a,3bの推力の大きさが調整され推力差を設定する。
(もっと読む)
飛行場船
【課題】航空機の騒音等による住民に対する環境公害を回避でき、離着陸距離が比較的長い陸上用航空機を離着船できるようにした、構造簡単に、安価に造船でき、商業採算がとれる飛行場船を提供する。
【解決手段】航空機が発着できる滑走路甲板と、前記滑走路甲板に連接して航空機が待機できる待機路甲板とからなり、滑走路甲板の一部又は全部を、上り勾配甲板1011に形成した飛行場甲板10を設けると共に、前記飛行場甲板10を支持する下部船体20であって、それぞれ推進装置(図示しない)と舵取装置202とサイドスラスタ装置203とを設けたものを、間隔をあけて、複数個、直列に設けた下部船体列を、間隔をあけて、2列又は2列以上並列に設けた飛行場船。
(もっと読む)
船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置
【課題】補助推進装置の設置や舵の制御が不要で、目標位置を設定するだけで目標位置までの経路上に船体を漂流させる船体用制御装置及び船体用制御プログラム並びに船体用制御プログラムを組み込んだ自動操舵装置を提供する。
【解決手段】船体は、船体用制御装置1とGPS航法装置2とクラッチ制御装置3とスラスタ制御装置5とを備える。繰船者が目標位置を設定すると、現在位置から目標位置までの設定経路が算出され、船体と設定経路との離間距離が限界偏位量を超えた場合、クラッチ制御装置3がクラッチ4を嵌めて船体を推進させ、船体が設定経路上に復帰するとクラッチ制御装置3がクラッチ4を脱して船体を停止させる。また、船体はスラスタ6を備えるため、船首方位を設定した方位に保持できる。
(もっと読む)
アウトドライブ装置
【課題】舵角度を高い精度で把握でき、且つ、小型化によって搭載性を向上させることが可能となるアウトドライブ装置を提供する。
【解決手段】シリンダスリーブ21と、前記シリンダスリーブ21に摺動可能に内設されたピストン22と、から構成される操舵用油圧アクチュエータ20を備えたアウトドライブ装置であって、前記シリンダスリーブ21に検出装置26を具備し、前記検出装置26が前記ピストン22の位置を検出することによって舵角度を把握する、とした。
(もっと読む)
アウトドライブ装置用操舵システム
【課題】アウトドライブ装置の舵角度が不明になった場合に該アウトドライブ装置の舵角度を自動的に舵中央とすることができる技術を提供する。
【解決手段】シリンダスリーブに内設されたピストンが摺動することによってアウトドライブ装置10を回動させる操舵用油圧アクチュエータ20と、操舵用油圧アクチュエータ20の作動油の流動方向を変更してピストンの摺動方向を切り換えるスプールバルブ30と、スプールバルブ30に制御信号を送信して作動油の流動方向を変更させる制御装置40と、を備えたアウトドライブ装置用操舵システム100であって、アウトドライブ装置10の舵角度が舵中央となるときに位置するピストンについて検出できるピストン検出センサ27を具備し、制御装置40は、ピストン検出センサ27からの電気信号に基づいてスプールバルブ30を制御することでアウトドライブ装置10の舵角度を舵中央とする。
(もっと読む)
31 - 40 / 243
[ Back to top ]