
国際特許分類[B63H25/42]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 推進器による操舵または動的停留;専用のプロペラによる操舵または動的停留;プロペラを備えた舵による操舵または動的停留 (243)
国際特許分類[B63H25/42]に分類される特許
51 - 60 / 243
船舶
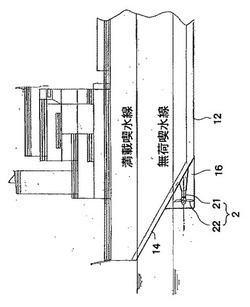
【課題】比較的大型の排水量型船舶において、無荷航行時にもバラスト水の使用を不要にし、積み荷のためのスペースを大きくとることができ、舵を不要にすることができる船舶を提供する。
【解決手段】船尾部の船底12の幅が最大船幅と略同一に形成されていて、船尾部において船底12から後方に上方へと斜めに立ち上がる傾斜外面14が備えられており、傾斜外面14から後方にスクリュー型推進器2が延出している。スクリュー型推進器2は、複数の左舷側推進器と複数の右舷側推進器とからなり、左舷側推進器と右舷側推進器とで互いに逆向きに回転する可変ピッチ翼22を備えている。スクリュー型推進器2は、可変ピッチ翼22が無荷喫水線より下に位置する程度の大きさである。スクリュー型推進器2の推進器軸21の配列の船幅方向の両外側にはスケグ16が設けられている。
(もっと読む)
船舶用推進制御装置および船舶

【課題】転舵ユニットのエネルギー効率に貢献でき、かつ、乗員の違和感を低減できる船舶用推進制御装置および船舶を提供する。
【解決手段】
船体ECU20は、船外機11L,11Rおよび転舵ユニット12L,12Rを制御する。ジョスティックユニット10は、中立位置から傾倒可能なレバー7と、中立位置から回動可能なノブ8とを備えている。操船者は、ジョイスティックユニット10の操作により、船舶1の進行方向および回頭を指示することができる。船体ECU20は、ジョイスティックユニット10の出力信号に応じて、船外機11L,11Rの出力および転舵ユニット12L,12Rの転舵角を制御する。船体ECU20は、船外機11L,11Rからの推進力を停止するとき、転舵ユニット12L,12Rの転舵角を保持するように構成されている。
(もっと読む)
船舶
【課題】燃料消費レベルが低く抑えられた船舶を提供する。
【解決手段】船舶であって、少なくとも一つの貨物倉と、複数のマグヌスローター10とを具備してなり、マグヌスローター10は、矩形領域を形成する少なくとも一つの貨物倉の角地点領域に配置されている。このマグヌスローターのそれぞれには、このマグヌスローターを回転させるための別個に動作可能な電動モーターが関係付けられる。各電動モーターには、この電動モーターの回転速度および/または回転方向を制御するためのコンバーターが関係付けられる。
(もっと読む)
スラスタユニットおよびスラスタユニットの取り付け方法
船体を備える船舶用のスラスタは、少なくとも1つのトンネル部材と少なくとも1つのスラスタユニットとを備える。船体に装着した際に、トンネル部材は船体の貫通トンネルの少なくとも一部を構成する。少なくとも1つのスラスタユニットと少なくとも1つのトンネル部材には、少なくとも1つのスラスタユニットを少なくとも1つのトンネル部材に取り外し可能に固定するための協働固定装置が設けられており、少なくとも1つのスラスタユニットをトンネルに挿入して少なくとも1つのトンネル部材に装着すること、あるいは少なくとも1つのトンネル部材から取り外してトンネル取り外すことができるように構成されている。船舶の船体に配設されたトンネル部材にスラスタを装着および取り外しする方法も開示される。 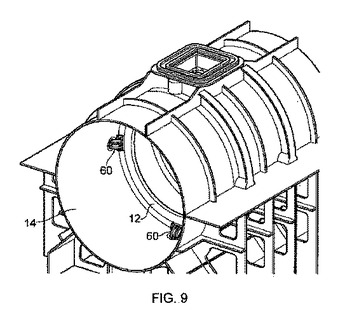 (もっと読む)
(もっと読む)
船舶の操舵装置
【課題】船舶において、船外機の転回位置を検出する転回角センサの異常を検出した場合、転舵不能にならず操船することができる操舵装置を提供する。
【解決手段】動力源としての船外機4と、船体の運転席に設置されるハンドル1と、ハンドルの操作角を検出する舵輪センサ2と、船外機を転回させるアクチュエータ5と、アクチュエータにより駆動された船外機の転回角を検出する転回角センサ6と、この転回角センサ信号と舵輪センサ信号とを入力し、操作角に応じて制御転回角を演算し、制御転回角と転回角の差異に基づき船外機4の転回角を制御するためのアクチュエータ5に駆動信号を出力する制御装置8から構成される。制御装置8は、転回角センサ6の異常を検出した場合、制御転回角に応じて予め決められた所定時間に基づき転回駆動を継続するとともに、転回角を推定して制御を行う。
(もっと読む)
船外機の操舵装置
【課題】ティラーハンドルにアシスト機構およびヘルム機構を用いてティラーハンドルの操作性の向上を図ることができる船外機の操舵装置を提供する。
【解決手段】船外機の操舵装置16は、船外機本体13およびティラーハンドル42の各操舵角の差異を操舵トルクとして検出するトルクセンサ41と、トルクセンサで検出した操舵トルクに基づいて制御可能な電動アシスト機構43と、電動アシスト機構で駆動されることで、船外機本体およびティラーハンドルの各操舵角の差異を補正するヘルム機構45とを備える。また、トルクセンサは、船外機本体およびティラーハンドルを連結する連結アーム28に設けられている。さらに、電動アシスト機構およびヘルム機構は船体11に設けられている。
(もっと読む)
船外機の操舵装置
【課題】操舵ハンドルからヘルム機構までの全長を短く抑えて多種の船体に設置可能な船外機の操舵装置を提供する。
【解決手段】船外機の操舵装置16は、ステアリングホイール37の操作でヘルム機構42を作動して船外機を操舵するものである。この操舵装置16は、ステアリングホイールに作用した操舵トルクに基づいてステアリングホイールの操作をアシストする電動アシスト機構41が設けられている。そして、電動アシスト機構に備えた電動アクチュエータ52の出力軸53がハンドル出力軸48に対して直交して配置されている。さらに、ヘルム機構の駆動軸67もハンドル出力軸に対して直交して配置されている。
(もっと読む)
船外機の操舵装置
【課題】船体の制約を受けることなく多種の船体に設置可能な船外機の操舵装置を提供する。
【解決手段】船外機の操舵装置16は、船体に設けたティラーハンドル37を操作してヘルム機構42を作動し、ヘルム機構で船外機を操舵するものである。この操舵装置は、ティラーハンドルに作用した操舵トルクを検出し、検出した操舵トルクに基づいてヘルム機構の操作をアシスト(補助)する電動アシスト機構41が設けられている。さらに、ティラーハンドルのハンドル軸に、ハンドル軸の回転を変速させて伝達可能な変速機38が連結されている。加えて、第3変速出力軸に電動アシスト機構およびヘルム機構を連結することで電動アシスト機構およびヘルム機構が一体的にまとめられている。
(もっと読む)
船外機の操舵装置
【課題】操舵ハンドルからヘルム機構までの全長を短く抑えて多種の船体に設置可能な船外機の操舵装置を提供する。
【解決手段】船外機の操舵装置16は、ステアリングホイール37の操作でヘルム機構42を作動して船外機を操舵するものである。この操舵装置16は、ステアリングホイールに作用した操舵トルクに基づいてステアリングホイールの操作をアシストする電動アシスト機構41が設けられている。そして、ステアリングホイールのハンドル出力軸48に対してヘルム機構の駆動軸67が並列に設けられている。さらに、ハンドル出力軸の回転をヘルム機構に伝達可能な動力伝達手段44でハンドル出力軸およびヘルム機構が連結されている。
(もっと読む)
舵に作用する力を決定するための装置
【課題】切換え履歴現象を減らせる船舶の自動操舵システム及び/又は動的位置決めシステムを提供する。
【解決手段】演算処理装置29と、舵の物理量、特に持上げ力及び/又は抵抗力の値を決定するための少なくとも一つの測定装置27,28と、求められた物理量の値を演算処理装置29へ送るための装置とを含む装置12が設けられており、演算処理装置29は、決定された物理量の値に基づいて舵に作用する力を決定するように構成されている。
(もっと読む)
51 - 60 / 243
[ Back to top ]