
国際特許分類[B63H25/42]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 推進器による操舵または動的停留;専用のプロペラによる操舵または動的停留;プロペラを備えた舵による操舵または動的停留 (243)
国際特許分類[B63H25/42]に分類される特許
71 - 80 / 243
船舶用操縦装置
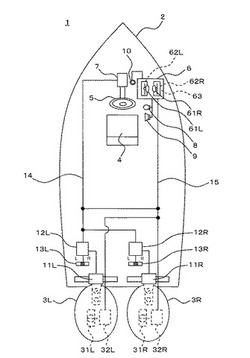
【課題】操舵装置を構成する何れかの機器に故障が生じた場合でも、故障していない他の機器を使用して船外機を操舵し、船舶を操縦可能な船舶用操縦装置を得る。
【解決手段】2機以上の船外機3L,Rが並置された船舶1に設けられる船舶用操縦装置であって、レバー位置検出部62L,Rで検出された、船外機のスロットル開度を調節するためのリモコン操作レバー61L,Rのレバー位置どうしの偏差を検出するレバー位置偏差検出部63と、船外機を操舵するためのハンドル5、ハンドルの操舵角を検出する操舵角検出手段または操舵角を伝送する通信線14に発生した故障を検出する故障検出手段とを備え、伝送された操舵角に基づいてアクチュエータ11L,Rを駆動する船外機操舵コントローラ12L,Rは、故障検出手段が故障の発生を検出した場合に、レバー位置偏差検出部で検出されたレバー位置偏差に基づいてアクチュエータを駆動する非常制御モードを有する。
(もっと読む)
船推進機

【課題】推進機本体の操舵に関する異常を判定できる船推進機を提供する。
【解決手段】船推進機10は、船外機本体28と、船外機本体28を操舵するための操舵部12と、操舵部12の操舵角を検出する操舵角センサ18と、船外機本体28の実舵角を検出するための回動センサ92と、ECU16とを含む。ECU16は、操舵角に基づく目標舵角と基準目標舵角とに基づいて目標舵角の変化量を算出し、実舵角と基準実舵角とに基づいて実舵角の変化量を算出し、目標舵角の変化量と実舵角の変化量とのずれ量を取得する。そして、ECU16は、ずれ量と第1閾値との比較結果に基づいて船外機本体28の操舵に関する異常を判定する。基準目標舵角および基準実舵角は、ずれ量と第2閾値との比較結果に基づいて設定される。
(もっと読む)
小型船舶用電気推進システム
【課題】小型船舶用電気推進システムにおいて、発電電力を効率的に使用でき、かつ、エンジン使用時にエンジンを効率の高い運転点で継続運転できるとともに、騒音を小さくできる構成を実現することである。
【解決手段】小型船舶用電気推進システム10は、エンジン12により駆動される発電機14と、発電機14により発電した電力が供給され、充電される主バッテリ16及び船内機器用バッテリ18と、発電機14により発電した電力が主バッテリ16を介して、または主バッテリ16を介さずに供給されるインバータ20と、インバータ20により駆動される推進用電動モータ28と、推進用電動モータ28により駆動されるプロペラ32とを備える。
(もっと読む)
推力発生装置
【課題】簡素な構成で、船舶の推力発生装置における冷却性を向上させる。
【解決手段】水中に配置されて水を噴射することで推力を発生させる推力発生装置10であって、ロータ本体43の一方側の側面及び外周面に対面配置されてスラスト方向及びラジアル方向の荷重を支える第1水潤滑軸受40と、ロータ本体43の他方側の側面及び外周面に対面配置されてスラスト方向及びラジアル方向の荷重を支える第2水潤滑軸受41と、プロペラ翼13bの一方側の流路に向けて開口した第1取水口37aと、プロペラ翼13bの他方側の流路に向けて開口した第2取水口38aと、第1取水口37aに流入する水を第2水潤滑軸受41に導く第1導水管37と、第2取水口38aに流入する水を第1水潤滑軸受40に導く第2導水管38と、を備えている。
(もっと読む)
推力発生装置
【課題】船舶の推力発生装置におけるメンテナンス性を向上させる。
【解決手段】水中に配置されて水を噴射することで推力を発生させる推力発生装置10であって、ロータ本体43は、第1水潤滑軸受40に対面する側面及び外周面を有する第1部材48と、第2水潤滑軸受41に対面する側面及び外周面を有する第2部材49と、ロータコア44の内周面に当接する支持面を有する第3部材50とを有し、第1〜第3部材48〜50が互いに着脱可能に固定されている。
(もっと読む)
船舶制御システム、船舶推進システムおよび船舶
【課題】通信バスを流れている通信データ量を効率的に利用でき、かつ、簡潔な構成で拡張機器の接続も可能にする。
【解決手段】船尾に一列に配列した3基の船外機3R,3C,3Lはそれぞれ船外機ECU20を有している。操船席には、ステアリング装置6、リモコン7および操作パネル8、ならびにこれらが接続されたリモコンECU60が備えられている。リモコンECU60と船外機ECU20との間は、CAN70で接続されている。CAN70は、リモコンECU60の第1ポートP1と船外機ECU20とに接続された第1通信バス71と、リモコンECU60の第2ポートP2と船外機ECU20とに接続された第2通信バス72とを有している。リモコンECU60は、第1通信バス71に操船制御情報を送出し、第2通信バス72にバックアップ情報を出力する。拡張機器80,90に関する情報(補助情報)は、第2通信バス72を通って伝送される。
(もっと読む)
船外機の操舵装置
【課題】操舵角が大きい場合であっても、左右操舵時のステアリング荷重を均一にすることを課題とする。
【解決手段】船外機の右操舵時、左操舵時共に、ステアリングプレート27の接続孔37部は、円弧47の接線方向の力F1を受ける。左操舵時にステアリングロッド35がステアリングプレート27を押す力をT3とし、右操舵時にステアリングロッド35がステアリングプレート27を引く力をT4とする。β3=β4であるため、T3=T4となる。すなわち、左操舵時と右操舵時とで、ステアリング荷重が均等となる。また、T2<T4となるので、ステアリング荷重の向上を図ることができる。
【効果】第1の直線と第2の直線とのなす角度は等しくなるので、ステアリングロッドを押し引きする力の大きさは等しくなり、左右のステアリング荷重を均等化することができる。
(もっと読む)
船推進機
【課題】伝達機構の動作精度を判定できる船推進機を提供する。
【解決手段】船推進機10は、船外機本体28と、船体に対して船外機本体28を左右方向に揺動可能に取り付けるためのスイベルブラケットと、船外機本体28を左右方向に揺動させるためにスイベルブラケットに設けられる電動モータ62と、モータ軸の回動角度を検出するために電動モータ62に設けられる回動センサ62aと、電動モータ62の駆動力を船外機本体28に伝達するためにスイベルブラケットに設けられる伝達機構と、船外機本体28の実舵角を検出するための回動センサ98と、船推進機10の動作を制御するためのECU16とを備える。ECU16は、回動センサ98の検出結果に基づく船外機本体28の実舵角変化量と、電動モータ62の駆動量に基づく理論変化量とを比較することによって、伝達機構の動作精度を判定する。
(もっと読む)
船外機
【課題】コストの低減を図ることができる転舵角検出機構を備えている船外機を提供する。
【解決手段】湾曲部材31は接触子35に接している。船外機本体を転舵すると、マウントフレーム25は、矢印(2)のように、想像線で示すマウントフレーム25の位置に移動する。すると、接触子35は、スイベル軸の中心55からの曲率半径が連続的に変化する湾曲部材31に押されて、矢印(3)のように、想像線で示す接触子35の位置に移動する。結果、角度センサ24で転舵角を検出することができる。
【効果】転舵角検出機構は、転舵最大角度の半分を超えない小さな角度の角度センサと、湾曲部材とからなるので、転舵角検出機構のコストを低減することができ、船外機全体のコストの低減を図ることができる。
(もっと読む)
舶用推進装置
【課題】コンパクトで船尾でのレイアウトの自由度が高く、優れた推進性能と高い舵効果が得られるタンデム型の二重反転システムの舶用推進装置を提供する。
【解決手段】舶用推進装置は、船尾の第1プロペラ4と、第2プロペラ6を有する旋回自在のポッド推進装置5を備える。第1プロペラと第2プロペラは二重反転プロペラを構成する。ポッド推進装置の第2プロペラは、筒型で断面形状が翼型のダクト20内にある。ダクト内での増速効果により二重反転による推進効果が向上し、直進時にはダクトの整流作用と推力により優れた推進性能を発揮する。旋回時には第1プロペラからの流れを受けたダクトによる舵機能と、第2プロペラ及びダクトによる推進力により、高い舵効果が得られる。
(もっと読む)
71 - 80 / 243
[ Back to top ]