
国際特許分類[B64C13/20]の内容
処理操作;運輸 (1,245,546) | 航空機;飛行;宇宙工学 (5,482) | 飛行機;ヘリコプタ (2,562) | 飛行操縦翼面,揚力増加フラップ,空気制動装置,またはスポイラを作動するための操縦系統または伝達系統 (300) | 入力装置 (189) | 自動的に作動されるもの,例.突風検出器に応答するもの (170) | 無線信号を使用するもの (81)
国際特許分類[B64C13/20]に分類される特許
1 - 10 / 81
操縦用通信装置、被操縦体用通信装置及び操縦用通信システム
【課題】操縦用通信装置において、パソコンや設定用専用機を用いずに、機体に搭載された機器のパラメータを送信機の側から遠隔的に変更する。
【解決手段】 通信装置1は、操縦モードとパラメータモードを選択でき、表示部10を備えた操縦用通信装置4(送信機)と、機体2に搭載された機器3に接続された被操縦体用通信装置5(受信機)を有する。パラメータモードでは送信機4の操作でパラメータ信号を受信機に送信し、表示部を見ながら機器のパラメータの変更を無線で遠隔的に行なう。受信機5からの返信のパラメータ信号で変更の結果を知ることができる。機器が複数種類、複数個あっても、機器を被操縦体から取り外す必要がなく、容易に変更できる。
(もっと読む)
遠隔操作システム

【課題】移動体に搭載した立体カメラから得られる映像を、操作者が移動体から見た映像に模して、臨場感を与え遠隔操作性を向上させた遠隔操作システムを提供する。
【解決手段】移動体と、該移動体を遠隔操作するリモートコントローラ2と、前記移動体の運転室又は操縦室を模した背景画像を格納した記憶部38とを有する遠隔操作システムであって、前記移動体は、ステレオカメラ15と、該ステレオカメラの撮像方向を制御する駆動部17,18,19と、少なくとも前記ステレオカメラにより撮影された映像を含む情報を通信する第1通信部34とを有し、前記リモートコントローラは、前記第1通信部との間で通信を行う第2通信部37と、前記移動体を制御する制御部と、前記ステレオカメラで撮影された映像の少なくとも一部及び前記背景画像とを合成して立体視可能に表示する表示部41とを有する。
(もっと読む)
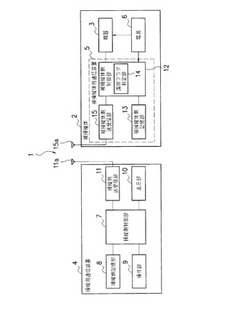
キャプティブキャリー無人航空機システムの実証のための飛行インタプリタ
【課題】無人航空機システム(UAS)の飛行制御システムおよびUASの飛行制御システムを搭載する有人無人両用機(OPV)を組み入れたUASのテストのためのシステムを提供する。
【解決手段】OPV12は、OPVの飛行制御システム19と、UASの飛行プロファイルの制御パラメータを表す、UASの飛行制御システムからの入力を受信する飛行制御インタプリタ(FCI)20とを有する。FCIは、OPVの飛行制御システムへ出力としてステータスコマンドを提供し、飛行プロファイルを再現する。こうしたステータスコマンドは、姿勢、垂直方向の航法、水平方向の航法、旋回率、速度、およびエンジン動作から成る群から選択される。OPVの飛行制御システムは、緊急事態、飛行の安全、または他の不測の事態に備えてパイロットのオーバーライドを含み、搭乗しているパイロットがOPVの制御を引き継ぐことができるようにする。
(もっと読む)
リモートコントロール方法及びリモートコントロールシステム
【課題】コスト高を招くことなく、目視できない状況下でも、移動体を直感的に操縦できるリモートコントロール方法及びリモートコントロールシステムを提供する。
【解決手段】移動体20、は、常に操縦者HMの視線方向(基準方向)と平行に、その前方を向けており、よって例えば視線方向に対して右に角度δの方向に進行したい場合、それに応じた操舵量だけ進行方向を操作する操縦装置のスティックを視線方向に対して右に角度δの方向に倒せばよい。
(もっと読む)
フリップ型運動を自動的に実行するための無人機の姿勢の動力学的制御方法
【課題】 本発明の目的は、ロール軸あるいはピッチ軸回りの完全なターンによるフリップをするための無人機の制御方法を提供することである。
【解決手段】 制御方法は、a)無人機に先行する上向きの垂直推力インパルスを与えるために無人機の各モータを同時に制御するステップと、b)初期角度位置から所定の中間角度位置まで、フリップの回転軸回りで無人機を回転させるため、各モータに異なる非サーボ制御コマンドを適用するステップと、c)非ゼロの角速度の中間角度位置からゼロ角速度の最終角度位置まで、次第に、回転軸回りの完全なターンによる無人機の回転を終えるために、参照目標軌道まで各モータへの独立したサーボ制御を適用するステップとからなる。
(もっと読む)
遠隔制御機器の駆動制御装置
【課題】模型ヘリコプタの駆動制御装置において、機体がヨー軸に対して回転運動をおこなっている場合でも、ロール軸およびピッチ軸の位相のずれに影響されずロールとピッチの操作が行える。
【解決手段】駆動制御装置は、ヨー軸角速度検出手段とメインロータ回転数検出手段を備え、これらの検出値から位相制御手段において、ヨー軸に対する回転運動によるロール軸およびピッチ軸の位相のずれ量を求め、ロール操作信号およびピッチ操作信号を補正して、ロールおよびピッチの制御を行うことができる。
(もっと読む)
飛行体の飛行制御システム
【課題】簡便に而も高精度に飛行体の高さ位置の測定を可能とし、無人飛行時の飛行体の飛行高度を適正に制御可能とした飛行制御システムを提供する。
【解決手段】飛行体と、該飛行体に設けられた航行手段8,9,10,11と、位置測定部17と、前記航行手段を制御する飛行制御部18と、前記位置測定部と前記飛行制御部とを制御する主演算制御部19とを具備し、前記位置測定部は飛行体の地上座標を測定するGPS装置23と、飛行体下方のデジタル画像を撮像する鉛直カメラ13とを有し、該鉛直カメラにより撮像した2地点の画像と、前記GPS装置により測定した2地点の地上座標と、前記鉛直カメラの焦点距離に基づき前記飛行体の高度を測定し、前記主演算制御部は測定された高度に基づき前記飛行制御部を介して前記航行手段を制御し、前記飛行体を所定の高度で飛行させる。
(もっと読む)
飛行経路ベースの探知および防止
【課題】航空機上で使用するための飛行経路ベースの探知防止システムを提供する。
【解決手段】他機からの分離間隔を維持するために、および/または他機との衝突を回避するために、4−D飛行経路または4−D多面体などの4−D構図166、192を利用する、航空機100上で使用するための飛行経路ベースの探知防止システム168。いくつかの実施形態では、飛行経路ベースの探知防止システム168は、動作中、外部ソースから提供された4−D飛行経路および/または様々なデータソースに基づき見積もられた4−D飛行経路を利用する。
(もっと読む)
管制間隔の喪失回避操縦
【課題】航空機の間の管制間隔の喪失を回避するために操縦を実行するシステムおよび方法を提供すること
【解決手段】航空機の飛行管理システムは、その航空機と別の航空機との間の管制間隔の喪失を回避するための操縦を判定することができる。この飛行管理システムは、プロセッサと、プロセッサからアクセス可能なメモリとを含むことができる。メモリは、当該航空機と第2の航空機との間の潜在的な管制間隔の喪失を識別するためにプロセッサによって実行可能な命令を格納することができる。命令を、所定のパラメータを使用する第1の速さ操縦が潜在的なLOSを回避すると予測されるかどうかを判定するためにプロセッサによって実行可能とすることもできる。命令を、第1の速さ操縦が潜在的なLOSを回避すると期待される時に第2の速さ操縦のパラメータを判定するためにプロセッサによってさらに実行可能とすることができる。
(もっと読む)
水難救助用無線ヘリコプター及び水難者救助システム及びその運転方法
【課題】水難者の救助を確実に行うことができる安価な水難救助用無線ヘリコプターを提供すること。
【解決手段】遠隔操作装置200によって無線操縦される無線ヘリコプター1である。無線ヘリコプター1は座席50とシートベルト60と高度センサ120と牽引ロープ71と運転制御装置130とを有する。運転制御装置130は、遠隔操作装置200によって指示された方向・速度にて水難地点A4まで無線ヘリコプター1を飛行させる手動操縦制御手段141と、遠隔操作装置200からの降下指令によって飛び込み可能高度まで降下し停止する降下制御手段143と、飛び込み可能高度まで降下したことを高度センサ120が検出した際にシートベルト60の着脱部61のロックを解除するベルトロック制御手段145と、遠隔操作装置200から指示された救出地点A3まで自動操縦にて無線ヘリコプター1を飛行させる自動操縦制御手段147とを具備する。
(もっと読む)
1 - 10 / 81
[ Back to top ]