
国際特許分類[B65B35/44]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 物品または材料を包装するための機械,器具,装置または方法;荷解 (11,467) | 包装される物品の繰出し,供給,整列または方向づけ (821) | グループに物品を整列したり,物品をグループで供給したりすること (437) | 無端帯またはチェーンによるもの (102)
国際特許分類[B65B35/44]に分類される特許
1 - 10 / 102
包装体の集積装置
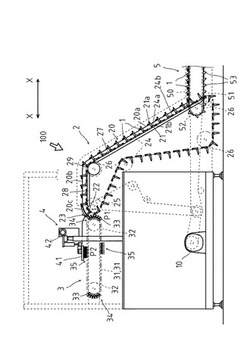
【課題】搬送供給装置において包装体を高速かつ確実に移送装置へと供給する包装体の集積装置を提供する。
【解決手段】自動包装機から排出された包装体1を搬送供給する搬送供給装置2と、搬送供給装置2から供給された包装体1をホルダ部材33に収容して移送する移送装置3と、移送装置3にて移送された包装体1を複数のホルダ部材33・33・・・から一度に搬出する搬出装置4と、を具備してなる包装体1の集積装置100において、搬送供給装置2は、包装体1の搬送経路に沿って延設され、包装体1が載置されるガイド部材20と、ガイド部材20に沿って移動可能に配設され、ガイド部材20よりも上方に突出された突出部21aにて包装体1を押動して搬送する押動部材21と、を有してなり、ガイド部材20の端部が下方湾曲され、押動部材21にて下方に押動されながらホルダ部材33へと包装体1が供給される。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
箱詰め装置
【課題】構造を簡素化して製造コストを低減できる箱詰め装置を提供する。
【解決手段】箱詰め装置10は、複数の物品Tを列状に並べて整列させる物品整列装置14と、整列させられた複数の物品Tを列の側方に同時に押し出す物品押出し装置16と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を把持する複数のチャック90を有し、複数の物品Tを外装箱Uの内部に押し込む物品押込み装置18と、物品押出し装置16で押し出されてきた複数の物品Tの上端部を複数のチャック90に押出し方向から案内する複数のアッパーガイド110とを備える。
(もっと読む)
卵包装装置および卵包装方法
【課題】単純な機構でありながら高速に鶏卵の包装処理を可能とする卵包装装置を提供する。
【解決手段】複数列で卵を搬送する複列搬送部と、前記複列搬送部で搬送される卵を収容するための、複数列の卵座を有する容器を搬送する容器搬送部とを備える卵包装装置であって、前記容器搬送部は、前記容器の搬送方向が前記複列搬送部の卵搬送方向に対し傾斜し、かつ当該容器搬送位置が当該複列搬送部の卵搬送位置より下方にあり、前記複列搬送部は、前記複列搬送部の第1列目で搬送される卵を、前記容器の第1列目の卵座に転載させる第1転載部と、第(n−1)転載部より搬送方向下流側に配置され、当該複列搬送部の第n列目で搬送される卵を、前記容器の第n列の卵座に転載させる第n転載部とを有する。
(もっと読む)
搬送装置
【課題】物品の損傷と転倒とを防止し、容易に物品のグループ化を行なう搬送装置を提供する。
【解決手段】ボトルWを第一速度V1で搬送可能な第一コンベア10と、第一コンベア10の搬送方向の下流側に間隙Dを介して配置され、第一速度V1よりも大きい第二速度V2にて搬送可能な第二コンベア20と、第一コンベア10によって搬送される複数のボトルWから、単位ボトル群Uを分離するグループ化手段25とを備える搬送装置1において、グループ化手段25を、間隙Dから第二コンベア20の上面にわたって配されボトルWが第一コンベア10から順次移載されるシート状部材30と、第二コンベア20上のシート状部材30を下流側に向かって第一速度V1で送り出す一方でシート状部材30を間隙D内に引き込み、該シート状部材30上の所定個数のボトルWを単位ボトル群Uとして第二コンベア20上に移載させる往復動機構40とから構成する。
(もっと読む)
カートナー
【課題】不定形で扁平な物品を積み重ねた集積体を安定した状態で確実に箱詰めすることができるカートナーを提供する。
【解決手段】マスク等の扁平な物品を1枚づつ包装した不定形で扁平な軽量のピロー包装体を積み重ねた集積体PGを物品搬送経路上の供給位置αに供給する物品供給手段10と、供給位置αに供給された集積体PGを物品搬送経路に沿って搬送する物品搬送手段20と、胴部を筒状に開口したカートンCを挿入領域βに搬送するカートン搬送手段30と、集積体PGを物品搬送手段20によって搬送しながら物品搬送経路上の挿入領域βでカートンCに挿入する物品挿入手段40とを備えている。物品挿入手段40は、集積体PGを物品搬送経路の側方に押し出すプッシャ44と、挿入領域βで集積体PGを上方から押える押え手段48とを有し、押え手段48によって集積体PGを上方から押えながら、プッシャ44によって側方に押し出すようになっている。
(もっと読む)
箱詰め装置
【課題】装置の大幅な改造を行わずに、物品変則詰め作業を自動化できる箱詰め装置を提供する。
【解決手段】箱詰め装置100の整列コンベア20の無端ベルト2Vは、駆動装置31、32を用いて独立して駆動される第1無端ベルト2VAおよび第2無端ベルト2VBを備える。そして、箱詰め装置100は、整列コンベア20の物品収容部2C、2C’が、第1無端ベルト2VA上に立設する第1仕切部材2Aの連なり、および、第2無端ベルト2VB上に立設する第2仕切部材2A’の連なりによって形成され、第1仕切部材2Aの連なりと、第2仕切部材2A’の連なりと、が、無端ベルト2Vの移動方向において交互に配置され、第1仕切部材2Aの連なりを用いて整列される物品Pの個数が、第2仕切部材2A’の連なりを用いて整列される物品Pの個数と異なるように構成されている。
(もっと読む)
箱詰め装置の運転方法
【課題】 物品収容部外へと物品を飛び出させるリスクおよび無端ベルトへの過剰負荷が、従来例よりも低減する箱詰め装置の運転方法を提供する。
【解決手段】 箱詰め装置100の運転方法は、整列コンベア2の運転パターンが、物品1の受け渡しにおける整列コンベア2での物品の処理能力に応じて区分けされている。そして、制御装置30が、検出手段20を用いて物品供給コンベア3での物品1の供給能力のサンプリングを行い、このサンプリングデータに基づいて物品1の供給能力の最大値を抽出し、この最大値に適合する運転パターンの設定値を用いて整列コンベア2での物品1の処理能力を調整する方法である。
(もっと読む)
包装袋の計数集積装置
【課題】省スペース化を実現した包装袋の計数集積装置を提供する。
【解決手段】スティック型の包装袋pを複数列に亘って同時に製造しかつ間欠的に供給する包装機に付設された計数集積装置であって、開閉可能な底部を有し包装機から供給された包装袋pを各列に対応して収容する同列の下部収容室43と、下部収容室43の各底部を任意数開放して包装袋pを落下させる可動底板と、下部収容室列43Aの直下で循環走行可能に配され下部収容室43から落下した包装袋pを受けたのち集積部に移送して落とし込むコンベア60とが具備される。
(もっと読む)
鶏卵整列装置
【課題】鶏卵の損傷を防ぎながら、均等な間隔で整列させることができる鶏卵整列装置を提供する。
【解決手段】本発明に係る鶏卵整列装置は、X方向へ鶏卵Eを搬送する搬送部1と、鶏卵Eを搬送部1の幅方向へ分散しながら停留させる停留部2と、停留部2の下流側に隣接し、搬送部1の幅方向に均等な間隔となるように鶏卵Eを案内する案内部3と、案内部3が案内する間隔と同じ間隔で鶏卵Eを整列させる整列仕切部4とを備えている。鶏卵Eは、案内部3によって整列仕切部4の上流側先端に直接接触しないように案内されるので、鶏卵Eの損傷や、整列仕切部4で形成された通路の入り口に鶏卵Eが重なり合って詰まることを防げる。また、鶏卵Eは、停留部2によって搬送部1の幅方向へ分散されるので、整列仕切部4で形成された複数の通路に偏りなく鶏卵Eを整列させることができる。
(もっと読む)
1 - 10 / 102
[ Back to top ]