
国際特許分類[B65G1/04]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 倉庫またはマガジン内における,物品の個々にまたは秩序だった貯蔵 (4,068) | 貯蔵装置 (3,167) | 機械的なもの (2,886)
国際特許分類[B65G1/04]の下位に属する分類
あらかじめ定められた位置または高さで取り出すために物品を供給するための手段をもつもの (133)
物品の挿入または取出しを容易にするための相対的に可動なラックをもつもの (97)
物品の挿入または取出しを容易にするための一つの閉回路中で動き得る物品の支持機または保持機をもつもの (72)
取出す物品を選択するための装置または自動制御手段をもつもの (1,643)
国際特許分類[B65G1/04]に分類される特許
31 - 40 / 941
自動倉庫
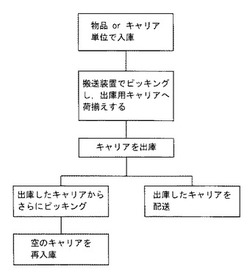
【課題】 倉庫内でピッキングができ、しかも一括して出庫する等の制約がない自動倉庫を提供する。
【構成】 自動倉庫は、複数の物品を正面から出し入れ自在なキャリアと、キャリアを複数個載置自在なラックと、入出庫用のステーションと、キャリア内の任意の物品及びキャリアのいずれも移載自在な移載装置を備え、ラックとステーションとの間でキャリアまたは物品を搬送する搬送装置とを備えている。
(もっと読む)
移動装置

【課題】坂坂道軌道部において停止した天井搬送車の移動を容易に行うことができ、作業性の向上を図れる移動装置を提供する。
【解決手段】移動装置1は、軌道Rに沿って走行する天井搬送車100を軌道Rの坂道軌道部SRで支持して移動させる装置であり、坂道軌道部SRに沿って設けられたガイドユニット10と、ガイドユニット10に摺動可能に設けられたスライド部12と、スライド部12をガイドユニット10に沿って移動させる移動機構16と、スライド部12に連結され、天井搬送車100を坂道軌道部SRにおいて支持する支持部14と、を備え、支持部14は、天井搬送車100を支持しないときには天井搬送車100と干渉しない位置にある。
(もっと読む)
搬送車システム
【課題】
ステーションの所定の位置に物品を正確に移載する。
【構成】
ステーションへ搬送車により物品を荷下ろしする。搬送車は出退自在なアームにより物品を移載する移載装置を備え、ステーションは物品がステーションの奥行き方向に沿って所定の位置まで前進したことを検出するセンサを備え、さらにセンサの信号により、搬送車の移載装置の進出を停止させる。
(もっと読む)
搬送車システム
【課題】不要な追い出し走行を行わずに、追い出しを実行できるようにする。
【解決手段】搬送車10は、コントローラ14の制御下で、予め定められた走行ルートを走行する。コントローラは、搬送車の現在位置と移動指令の有無と移動指令を有する搬送車の目的地とを把握する。コントローラは、移動指令を有する第1の搬送車の現在位置から所定の範囲内で、かつ目的地を越えない追い出し範囲内に位置し、移動指令を有さない第2の搬送車を検出して追い出し先を決定すると共に、第2の搬送車の現在位置から追い出し先までの範囲内に位置し、かつ移動指令を有さない第3の搬送車を検出して追い出し先を決定する。コントローラは、第3の搬送車が追い出し先へ先着でき、かつ第2の搬送車が、第3の搬送車を除いて、追い出し先へ先着できるか否かを判断し、先着できると判断された場合に、第2の搬送車及び第3の搬送車に追い出し先への移動を指令する。
(もっと読む)
物品搬送設備
【課題】フォーク機構により物品の移載を行う際、フォーク機構の出退方向視において、たとえ物品の重量が左右いずれか一方に偏っていても、フォーク機構からの物品の落下を確実に防止することのできる物品搬送設備。
【解決手段】移動体に物品Cを載置支持して移載するフォーク機構12が出退及び昇降操作自在に設けられ、移動体とフォーク機構12を制御する運転制御手段が設けられている物品搬送設備で、フォーク機構12により物品移載対象箇所8に位置する物品Cを持ち上げ支持した状態で、フォーク機構12の出退方向視において持ち上げ対象の物品Cの左右横方向における傾斜を検出するための傾斜状態検出手段32が設けられ、運転制御手段が、傾斜状態検出手段32の検出情報に基づいて、持ち上げ対象の物品Cが傾斜していない場合に当該物品Cの移載を実行するように構成されている。
(もっと読む)
移載装置及び移載方法
【課題】移載装置の簡素化及び小型化を図りつつ、移載対象が重量物の場合であっても高精度な位置決め及び移載を行うことができる、移載装置及び移載方法を提供する。
【解決手段】移動台車11に固定された固定フォーク2と、固定フォーク2に摺動可能に支持された中間フォーク3と、中間フォーク3に摺動可能に支持された先端フォーク4と、先端フォーク4に配置されるとともに載置台上で物品Aを支持するパレットPに係合可能な係合手段5と、を有し、先端フォーク4は、中間フォーク3が、パレットPを荷台11a上に引き込んだ退避位置からパレットPを載置台上に押し込んだ延伸位置まで移動する間に、中間フォーク3の後端から前端まで移動し、中間フォーク3は、退避位置に移動したときに移動台車11又は固定フォーク2の後端からはみ出した状態となるように構成されている。
(もっと読む)
同期台車
【課題】本発明は、同期台車の荷台部を待機位置と使用位置間で移動させるためのアクチュエータを不要にすることを目的とする。
【解決手段】本発明に係る同期台車は、コンベヤの力で同期台車本体部22が前進する際に、その同期台車本体部22の前進により回転する転動車輪25と、同期台車本体部22に設けられ、転動車輪25の回転力を駆動源として荷台部30を待機位置から使用位置まで移動させる移動機構50と、転動車輪25の回転力を移動機構50に伝達し、あるいは回転力の伝達を解除できるクラッチ機構60と、荷台部30が待機位置から使用位置まで移動する際に、荷台部30の戻り方向の移動エネルギーを蓄え、クラッチ機構60が回転力の伝達を解除しているときに、戻り方向の移動エネルギーによって荷台部を待機位置まで戻すことが可能な戻し機構とを有する。
(もっと読む)
物品収納設備
【課題】物品を搬出部に迅速に出庫することができる物品収納設備を提供する。
【解決手段】搬入部3に搬入された物品Wより予定搬出時期が早い物品Wが仮置き部5に仮置きされていない場合は、搬入部3に搬入された物品Wを仮置き部5に仮置きし、搬入部3に搬入された物品Wより予定搬出時期が早い物品Wが仮置き部5に仮置きされている場合は、搬入部3に搬入された物品Wを搬入部5から収納部1の奥側収納箇所1bに入庫した後、仮置き部5に仮置きされている物品Wを収納部1の手前側収納箇所1aに入庫する。
(もっと読む)
搬送車
【課題】被搬送物の位置ずれを効率良く補正することができる搬送車を提供する。
【解決手段】搬送車1は、走行台車3と、ターンテーブル9と、カセットW載置すると共に、所定の伸縮方向に沿って伸縮してカセットWを出し入れする移載装置11と、移載装置11にカセットWが載置されたときに、伸縮方向におけるカセットWの第1位置を検出する第1位置検出センサ13と、移載装置11にカセットWが載置されたときに、伸縮方向に水平面で直交する方向におけるカセットWの第2位置を検出する第3位置検出センサ17と、移載装置11がカセットWを取り込んでからカセットWの移送先に到達するまでに、カセットWの位置ずれの補正量を算出し、補正量を加味した走行台車3の移動量、ターンテーブル9の回転量及び移載装置1の伸張量を設定するコントローラ19とを備える。
(もっと読む)
自動倉庫、自動倉庫の可搬情報提示方法
【課題】自動倉庫の搬送効率の低下を抑制しつつ搬送車のメンテナンスを行う。
【解決手段】複数段に配置される搬送レール101と、搬送レール101上を走行する複数台の搬送車102とを備える自動倉庫であって、搬送車102が保持されるメンテ台103と、搬送レール101とメンテ台103との間で搬送車102を移載する移動台車104とを備え、移動台車104は、搬送レール101の端部と接続されて搬送車102を走行状態で移載可能な保持レール141と、保持レール141を昇降可能に支持する基体142と、基体142を搬送レール101と交差する方向に移動させる移動手段143とを備え、メンテ台103は、保持レール141の端部と接続されて搬送車102を走行状態で移載できるメンテレール131を備える。
(もっと読む)
31 - 40 / 941
[ Back to top ]