
国際特許分類[B65G1/137]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 倉庫またはマガジン内における,物品の個々にまたは秩序だった貯蔵 (4,068) | 貯蔵装置 (3,167) | 機械的なもの (2,886) | 取出す物品を選択するための装置または自動制御手段をもつもの (1,643)
国際特許分類[B65G1/137]に分類される特許
21 - 30 / 1,643
宅配支援システム
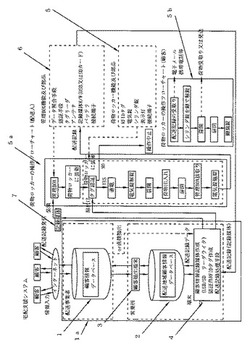
【課題】配送人や配送車の配送時間効率が上がり、燃料費の節約も可能となる宅配支援システムを提供する。
【解決手段】配送事業者が宅配支援サービスを受けようとする顧客から、インターネット等を介して取得した顧客情報から荷物ロッカーに貼る顧客認証RFIDタグと、管理ボックスに装填する顧客情報記録媒体を作成し、配送人の携帯する管理ボックスを顧客の管理する荷物ロッカーに装着することで顧客認証を行い、認証可の場合には通電され電気錠を解除し荷物の出し入れをする。荷物ロッカーには前記電気錠と顧客が解施錠するためのシリンダ錠の2系統を備え、電気錠のノッチとシリンダ錠のレバーを噛みあわせることで、どちらか一方の解錠で扉が開く状態となり、どちらか一方の施錠で扉が開かない状態の構成としているため顧客はシリンダ錠の操作で荷物の出し入れができる。
(もっと読む)
物品管理システム

【課題】本発明は、管理領域外においては通信を禁止できる無線通信用タグを提供することを目的とする。
【解決手段】タグ11が取り付けられた物品100が、再生産処理工場102に入荷されると、タグ11にアンテナモジュール12が取り付けられる。これにより、再生産処理工場102において、物品100に取り付けられた無線通信用タグ1は通信可能な状態となる。一方、再生産処理工場102から物品100が出荷されるとき、アンテナモジュール12がタグ11から取り外される。これにより、再生産処理工場102の外域では、物品100にタグ11だけが取り付けられた状態となるため、通信不可能な状態となる。
(もっと読む)
ロボット仕分けシステム及び仕分け済み物品の製造方法
【課題】既存の設備で、被仕分け物品に関する仕分けパラメータの変動に柔軟に対応して仕分けを行うことができるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、ビジョンセンサ27を有するロボット11と、ロボットコントローラ14を有しており、レーザセンサ26で搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置にある荷物4を特定し、ビジョンセンサ27で上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25で持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
物品管理システム、物品管理方法及び物品管理プログラム
【課題】効率よく、物品を管理する情報を自動で生成する。
【解決手段】倉庫内の物品の周辺を移動する移動体に、アクティブRFIDタグと、パッシブRFIDリーダを設け、倉庫内にアクティブRFIDタグの無線信号を受信する複数のアクティブRFIDリーダを設けておく。また、物品を管理する情報を生成する管理装置10の検出部36が、エリア情報DB50を参照し、アクティブRFIDリーダそれぞれで受信される無線信号の信号強度に基づいて、移動体60の時刻毎の位置を検出し、時刻特定部40が、タグIDがパッシブRFIDリーダにより読み取られた時刻を特定し、生成部42が、時刻特定部の特定結果と、検出部の検出結果との関係から、タグIDの取得位置(エリア)を含む物品を管理する情報(管理情報DB56)を生成するようにする。
(もっと読む)
搬送車システム
【課題】経路上に進入禁止区間が設けられた場合であっても、効率的な搬送作業を可能とする搬送車システムを提供すること。
【解決手段】経路140と、複数の搬送車300と、複数の搬送車300の制御を行うコントローラ120とを備える搬送車システム100であって、MCS120は、搬送要求を受信する通信部121と、進入禁止区間を示す区間情報および予備期間を示す予備期間情報を記憶する記憶部122と、搬送要求が、予備期間内において実行の開始が予定され、かつ、目的地が進入禁止区間に含まれている特定搬送要求であるか否かを判定する判定部125と、当該搬送要求が特定搬送要求であると判定された場合、目的地の代わりとなる代替目的地を決定する代替目的地決定部126と、決定された代替目的地に、複数の搬送車200のうちのいずれかの搬送車200を向かわせるための搬送指令を送出する指令送出部127とを備える。
(もっと読む)
入荷情報記録システム、入荷情報記録方法、及びプログラム
【課題】安価な設備投資で、入荷した物品のデータを迅速に記録できる入荷情報記録システムを提供する。
【解決手段】入荷情報記録システムは、入荷拠点ごとに独立して設けられるデータベース6と、入荷拠点に入荷される物品を特定する符号および該物品の数量のデータを含むバーコードBを印刷する印刷部と、入荷拠点に入荷された物品に添付されたバーコードBから、入荷拠点に入荷された物品を特定する符号および該物品の数量のデータを抽出する物品データ抽出部61と、物品データ抽出部61が抽出したデータを、物品が入荷された入荷拠点に設けられるデータベース6に記録する入荷履歴データ記録部63とを備える。
(もっと読む)
部品管理システム
【課題】部品の保管位置に対応して照射位置を変更できる部品管理システムを提供すること。
【解決手段】複数部品Sを保管し、入出庫をするための部品管理システム1であって、複数部品Sを保管するための棚11,12が設けられた保管棚10と、保管棚10に保管された部品Sを取り出す側と対向する位置に設けられ、部品Sの保管位置を指し示すためにレーザ照射位置Pを変更可能なレーザポインタ20と、部品SのID情報および保管位置情報を入力する入力手段30と、部品SのID情報と保管位置情報との対応関係を記憶する保管位置記憶部52を有し、レーザポインタ20のレーザ照射位置Pを制御する制御手段50とを備え、部品出庫時にオペレータが入力手段30に出庫する部品SのID情報を入力すると、制御手段50は、該対応関係に基づいてレーザポインタ20のレーザ照射位置Pを当該部品Sの保管位置に制御する。
(もっと読む)
ロボット仕分けシステム、ロボット装置、及び仕分け済み物品の製造方法
【課題】作業者の労力負担を低減しつつ信頼性を向上できるようにする。
【解決手段】ロボット仕分けシステム1は、搬入側カーゴ9と、搬出側カーゴ10A〜10Fと、アーム24、吸着パッド25、レーザセンサ26、及びビジョンセンサ27を有するロボット11と、ロボットコントローラ14とを有しており、レーザセンサ26により搬入側カーゴ9に載置された複数の荷物4それぞれの上面までの距離情報を取得し、上面が最も高い位置に存在する荷物4を特定し、ビジョンセンサ27により上記特定された特定の荷物4の外形情報を取得すると共に特定の荷物4の仕向地情報の取得を図り、特定の荷物4の形状及び大きさを算出し、特定の荷物4に対応した特定の仕向地区域を決定し、特定の荷物4を吸着パッド25により持ち上げつつ特定の仕向地区域に対応した特定の搬出側カーゴ10へ積み付けるように、ロボット11の動作を制御する。
(もっと読む)
食品配置演算装置、食品配置演算方法及び食品配置演算プログラム
【課題】食品が互いに影響することが少ない配置の組合せを演算する方法を提供する。
【解決手段】複数の配置場所を有する容器に複数の食品を配置する場所を演算する食品配置演算方法にかかわり、隣り合う領域が影響を及ぼす程度を示す容器情報を設定し記憶部に記憶する容器情報設定工程と、食品が他の食品に影響を及ぼす程度を示す影響度属性と食品が他の食品に耐性を備える程度を示す耐性属性と、の属性を示す食品情報を設定し記憶部に記憶する食品情報設定工程と、食品情報から食品の相性を示す相性情報を演算部が演算する相性情報演算工程と、容器に配置する食品の種類を示す食品リストを設定し記憶部に記憶する食品リスト設定工程と、配置場所に食品を配置したときに隣り合う食品の影響が少ない組合せを演算部が演算する配置演算工程と、を有する。
(もっと読む)
情報処理装置、情報処理方法、プログラム
【課題】梱包を要するバラ扱いの品目が含まれる出荷指示がある場合においても二次仕分け作業を無くすことが可能な出荷指示を抽出可能とする。
【解決手段】複数の出荷情報から所定の出荷情報を抽出可能な情報処理装置であって、品目毎に当該の種別を特定する情報が割り当てられている複数の出荷情報を管理する管理手段と、前記管理手段により管理される出荷情報のうち、品目の種別を特定する情報として梱包を要する品目であることを示す情報が割り当てられている品目を1つ含む出荷情報を抽出する第一の抽出手段とを有する。
(もっと読む)
21 - 30 / 1,643
[ Back to top ]