
国際特許分類[B65G29/00]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | ロータリコンベヤ,例.回転ディスク,回転アーム,回転スターホイールまたは回転コーン (8)
国際特許分類[B65G29/00]の下位に属する分類
傾斜または垂直移送用 (1)
国際特許分類[B65G29/00]に分類される特許
1 - 7 / 7
回転式容器移送装置
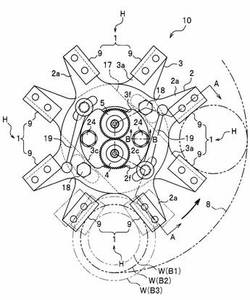
【課題】径違いにも容易に対応でき、芯ずれが生じない回転式容器移送装置を提供する。
【解決手段】第1上回転体2、第1下回転体3と、第2上回転体、第2下回転体と、第1上回転体2の外形は複数の腕部がスターホイール状に延設され、中心には穴が形成され、その内周面には第1内歯車2fが形成されている。この第1内歯車2fに噛み合う第1ピニオンギヤ4と、第1下回転体3の外形には複数の腕部がスターホイール状に延設され、内周面には第1内歯車2fと対向する位置に第2内歯車3fが形成されている。この第2内歯車3fと第1ピニオンギヤ4に噛み合う第2ピニオンギヤ5とを備え、第1上回転体2と第2上回転体とを第1連結ピンによって連結し、第1下回転体3と第2下回転体13とを第2連結ピンによって連結し、第1上回転体2、第1下回転体3を回動すると、第2上回転体、第2下回転体も回動する回転式容器移送装置10。
(もっと読む)
容器から桿状体を配送する装置及び方法並びに後続の搬送装置
本発明は、容器(1)から桿状体(2)、すなわち配送口(3)を有するホッパーからペットボトル用加工材料(プリフォーム)を配送する装置であって、配送口(3)に回転する円板(5)が備えられていることを特徴としている。 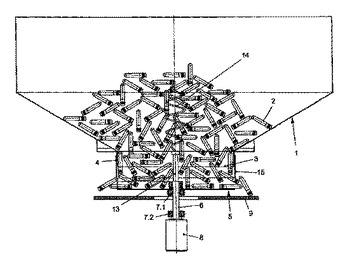 (もっと読む)
(もっと読む)
球体搬送装置

【課題】 球体を搬送する際に、一部で故障が生じても、搬送全体が停止することが無く、高さ寸法が小さい搬送装置を提供する。
【解決手段】 多数のパチンコ玉36を水平な搬送方向に搬送する球体搬送装置10が、搬送樋11を有し、搬送樋11の底壁12に載置されたパチンコ玉36が、転動して、実質的に水平方向に移動可能である。底壁12の上方に羽根車20a乃至20hが設けられている。羽根車20a乃至20は、パチンコ玉36の搬送方向を横切る軸回りに回転可能な複数の回転体を有し、その周囲にパチンコ玉36に接触可能に羽根部材が付設されている。各回転体を同一方向にモータが回転させる。羽根車20a乃至20hの回転によって羽根部材が、パチンコ玉36に衝突することにより、パチンコ玉36が搬送される。
(もっと読む)
テーブルフィーダから漏れ出たバラ物の回収装置
【課題】 新たな装置を付加することなく、即ち構造簡単にして低コストで荷詰まりによるターンテーブルの回転不能を防止することができるテーブルフィーダから漏れ出たバラ物の回収装置を提供する。
【解決手段】 フレーム3に対し駆動手段24によって鉛直な旋回軸A回りに旋回されるバケットエレベータ6と、該バケットエレベータ6からバラ物5を受けて所定箇所(出口シュート27)に供給するテーブルフィーダ10と、該テーブルフィーダ10の下方に配置され、該テーブルフィーダ10から漏れ出たバラ物5を受ける荷受け部材28と、該荷受け部材28の上面に当接され、該荷受け部材28上のバラ物5を回収部29に掻き寄せるための掻き板30とを備え、荷受け部材28及び掻き板30のいずれか一方をフレーム3に取り付けると共に他方をバケットエレベータ6に取り付け、駆動手段24によるフレーム3に対するバケットエレベータ6の旋回駆動力を利用して、掻き板30と荷受け部材28とを相対的に移動させるようにした。
(もっと読む)
被装飾円筒容器の保持部材
【目的】 マンドレルスリーブの外周面に複合皮膜を設けることにより、めっき金属の凝着阻止に有効で耐摩耗性に優れたシームレス缶保持部材を提供し、もって、シームレス缶への装飾(印刷・塗装)精度を向上させること。
【構成】 円筒容器を回転可能に保持するために用いられるマンドレルのスリーブ外周面に、溶射皮膜である下層と黒色のダイヤモンドライクカーボン薄膜である上層とからなる複合皮膜を設けた被装飾円筒容器の保持部材。
(もっと読む)
水冷式ロータリーバルブ
【目的】 回転軸及び羽根の表面に結露を生じさせて、醸造用原料が付着するのを防止するようにした水冷式ロータリーバルブを提供する。
【構成】 回転軸1の外周に羽根2を放射状に連設してなるローター本体3を、ケーシング4内に回転可能に嵌装する。回転軸1の内部に冷媒の流路5を形成すると共に、羽根2の内部に通流路6を形成する。流路5と通流路6を連通して、流路5及び通流路6に水等の冷媒を送通する。冷媒によって回転軸1及び羽根2を冷却して表面に結露を生じさせ、醸造用原料が隔室内の壁面に付着するのを防止するようにした。
(もっと読む)
ロータリテーブルの回転角度較正方法
【目的】 ロータリテーブルによるワークの自動供給装置において、メモリに記憶されたテーブルの角度データを較正する。
【構成】 自動搬送機構に設けられたロボット機構5のハンドアーム5a に光学式の変位センサ9a を、また、テーブル4の半径ORの方向に回転角度の基準を示す基準反射板9b をそれぞれ設ける。ロータリテーブル4の中心Oを通るX軸を固定側の基準線とし、メモリに記憶された基準角度データを制御回路に与えてテーブルを回転し、基準反射板をX軸に一致させて停止する。変位センサ9a をX方向に移動して基準反射板の両端のY座標値ya,yb をそれぞれ測定し、両Y座標値の差と両端間の長さLとによりX軸に対する基準反射板のズレ角度θを算出し、これをメモリ10c に与えて記憶された各角度データを較正する。
(もっと読む)
1 - 7 / 7
[ Back to top ]