
国際特許分類[B65G35/00]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 他に分類されない機械的なコンベヤ (217)
国際特許分類[B65G35/00]の下位に属する分類
支持面上で円筒形または円柱形物品を転動するように設けられたエンドレスな牽引要素,例.ベルト,からなるコンベヤ
一端で巻き込まれ,他端で繰り出されるフレキシブルなロードキャリヤ (4)
通路,例.閉通路,に沿って動くロードキャリヤ (117)
通路,例.閉通路,に沿って移動可能な,連結されていないロードキャリヤ,例.ベルト片,の列であって,その各ロードキャリヤは互いに接触するようにされており,しかも順番に各ロードキャリヤと係合するようにされた手段により推進されるようになっているものからなるコンベヤ (24)
国際特許分類[B65G35/00]に分類される特許
1 - 10 / 72
搬送装置
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
無人搬送システムおよび無人搬送車
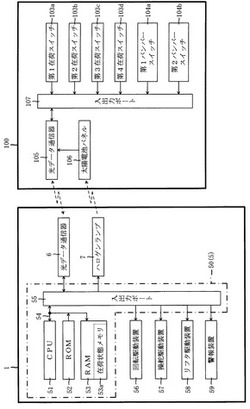
【課題】パレットのバッテリ残量に影響されることなく、パレットからのデータ信号を無人搬送車で受信して走行することができる無人搬送システムおよび無人搬送車を提供すること。
【解決手段】無人搬送車1のハロゲンランプ7から光をパレット100の太陽電池パネル106へ出力することにより、パレット100の光データ通信器105を太陽電池パネル106から供給される電力によって駆動させて光データ信号を出力させ、その光データ信号が光データ通信器6に受信される。これにより、パレット100のバッテリ残量に影響されることなく、無人搬送車1の走行を制御させることができる。
(もっと読む)
搬送システム

【課題】イニシャルコストの低減を図りつつ、弊害の発生を伴う電力ケーブルの接続を不要とすることができ、リフター装置等の他の装置を用いずに搬送物の台車への搬入高さと台車からの搬出高さとを一致させることができる搬送システムを提供すること。
【解決手段】駆動コンベア1を有する複数のステーション2,3と、各ステーション前に停車する台車4と、複数のステーションを結ぶレール5とを備え、ステーションに、駆動コンベアが有する回転運動エネルギーを外部に出力するための出力部6が設けられ、台車に、出力部に着脱自在に接続される入力部7と、入力部から入力された回転運動エネルギーを位置エネルギーに変換して備蓄した後、位置エネルギーを回転体の回転運動エネルギーとして出力するエネルギー備蓄機構とが設けられ、回転体はレールに係合する。
(もっと読む)
加工ラインにおけるワーク搬送システム
【課題】加工ラインにおけるワーク搬送システムにおいてワーク載置用のハンガーを退避させるにあたり、省スペース化、構造の簡略化を図る。
【解決手段】搬送ハンガーを複数の加工工程にわたり移動させるワーク搬送システムであって、メイン搬送レール1に対し並列状に設けられ、メイン搬送レール1との間で第2搬送ハンガー20の乗り入れが可能であって上流のサイドパネル外板仮溶接工程51と下流のサイドパネルコンポーネント工程54とをつなぐ第1分岐搬送レール2を備え、ワークが載置された状態の第2搬送ハンガー20がサイドパネル外板仮溶接工程51からメイン搬送レール1を介してサイドパネルコンポーネント工程54に移動し、空状態の第2搬送ハンガー20がサイドパネルコンポーネント工程54から第1分岐搬送レール2を介してサイドパネル外板仮溶接工程51に移動する。
(もっと読む)
物体移動装置
【課題】フォロワ台車に地面に対する走行車輪の滑り等による運動誤差が生じた場合でも、物体を目標位置まで確実に搬送し得る物体移動装置を提供する。
【解決手段】リーダ台車Aとフォロワ台車Bを物体の重心における制御点回りにインピーダンス制御し、リーダ台車Aに与えられる目標軌道に基づくフォロワ台車Bの目標軌道を該フォロワ台車Bにも与え、フォロワ台車Bに搭載された軌道センサを用いて算出したフォロワ台車Bの位置・姿勢と実空間における位置・姿勢との運動誤差を推定し、該推定される運動誤差を修正しながらフォロワ台車Bを移動させるよう構成する。
(もっと読む)
ワーク搬送装置
【課題】天井の低い建屋にも対応しながら鉛直方向に交差する面の方向にワークを搬送するワーク搬送装置を提供する。
【解決手段】横走行ユニット111は、基礎レール106に載置される第1ローラ116と、可動レール112bと、自走部401とを有する。可動レール112bは、Y方向に延びる。自走部401は、横走行ユニット111をX方向に自走させる。縦走行ユニット121は、可動レール112bに載置される第2ローラ125と、ワークを把持する把持部201と、を有する。横走行ユニット111は、縦走行駆動ユニット301も備える。縦走行駆動ユニット301は、縦走行ユニット121をY方向に搬送する。
(もっと読む)
搬送用走行体の走行制御方法
【課題】走行速度可変の自走式搬送用走行体1を作業区間WAに一定の作業速度VLまで減速させた状態で進入させること。
【解決手段】各搬送用走行体1には、前後に隣り合う搬送用走行体1間でデータ通信を行うデータ通信手段13,14が設けられ、作業区間WAの上手側走行経路中には、計測起点P1が設定され、作業区間WAへ高速で接近する後ろ側搬送用走行体1Zとその前方の作業速度VLで走行する前側搬送用走行体1Yには、計測起点P1からの走行距離に相当する現在位置情報を持たせ、後ろ側搬送用走行体1Zでは、自体の現在位置情報と前記データ通信手段を介して受け取った前側搬送用走行体1Yの現在位置情報とに基づいて前側搬送用走行体1Yとの間の距離を演算させると共に当該距離の漸減変化に基づいて減速制御を行わせ、前記距離が設定値に達したドッキング完了時に後ろ側搬送用走行体1Zが作業速度VLで自走しているように制御する。
(もっと読む)
搬送機構、及び、それを備えた真空処理装置
【課題】ラック・アンド・ピニオンの技術を用いた縦型搬送によるインライン型の真空処理装置であって、ピニオンギヤとラックギヤが同期ずれにより、トレイに振動や衝撃を与えることなく搬送を可能にする搬送機構、及び、それを備えた真空処理装置を提供することにある。
【解決手段】複数のピニオンギヤのうち、少なくとも2つが回転してラックギヤに順次噛合することにより、該ラックギヤを現工程の処理室内に配置されるピニオンギヤから、次工程の処理室内に配置されるピニオンギヤへと受け渡して、トレイを搬送するラック・アンド・ピニオン機構、及び、それを備えた真空処理装置であって、前記ピニオンギヤをそれぞれ独立に上下移動させる上下駆動部を有していることを特徴とする。
(もっと読む)
搬送台車の転倒防止装置
【課題】簡単な構造で製造コストも小さく、多様な荷の転倒を防止できる。
【解決手段】搬送台車の移載装置の搬送面CFの両側に、被搬送物の出し入れを案内するガイドレール15をそれぞれ配置し、ガイドレール15の前後位置に、垂直軸に回動自在に支持されて、パレットP左右側面の前後ポケットP1f,P1rに嵌合可能な回動ストッパ23と、これら回動ストッパ23を、ポケットP1f,P1rに嵌合される中立係止位置Cに保持するとともに回動付勢するコイルばねとを有する転倒防止具22R,22Lを設けた。
(もっと読む)
搬送装置
【課題】既存の案内レールに曲線状の部分を追加する場合でも、設備の大規模な改修を必要とせず、かつ部品点数の増大を招くことなく、曲線状の部分における本体の安定した移動を確保する搬送装置を提供する。
【解決手段】操舵輪部32および操舵輪部33は、それぞれ旋回中心軸43および旋回中心軸44において本体31に対して旋回する。そのため、ローラ部材37およびローラ部材38は、案内レール11の曲線レール15においても、安定して案内レール11との接触を維持する。また、搬送ユニット13の駆動力を伝達するピニオンギアは、操舵輪部32の旋回中心軸43と同軸上に設けられている。そのため、旋回中心軸43とラックレールとの間の距離、すなわちピニオンギアとラックレールとの噛み合い位置は、搬送ユニット13が案内レール11の曲線レール15を通過するときも一定となる。
(もっと読む)
1 - 10 / 72
[ Back to top ]