
国際特許分類[B65G43/04]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | 制御,例.安全,警報,調整装置 (526) | 駆動要素と荷運搬器との間のスリップの検出,例.駆動停止用 (5)
国際特許分類[B65G43/04]に分類される特許
1 - 5 / 5
ローラコンベヤ、及びその滑り検出方法
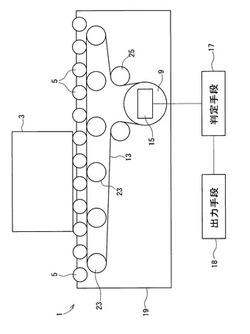
【課題】駆動ベルトの交換時期を適切に判定できるローラコンベヤ、及びその滑り検出方法を提供する。
【解決手段】ローラコンベヤ1は、荷物3を受け止める複数のローラ5と、駆動源7により回転する駆動プーリー9と、前記駆動プーリー9に巻掛した駆動ベルト13と、駆動プーリー9の回転する加速度を検知する加速度検知手段15と、加速度検知手段15の検知した加速度の大きさを判定する判定手段17とを備える。判定手段17は、所定期間に加速度検知手段15により加速度の検知された回数に基づき警告を出力するコンピュータである。加速度検知手段15は、駆動プーリー9に取付けた加速度センサである。
(もっと読む)
コンベアのベルトスリップ検出方法、およびコンベアのベルトスリップ検出機構

【課題】可変速コンベアにも適用可能で、かつ運転データの蓄積等を必要とすることなくベルトスリップの検出を行うことのできるベルトスリップ検出方法を提供する。
【解決手段】モータ22により駆動される駆動プーリー16と、駆動プーリー16に掛け回されたベルト20を介して連れ回りする従動プーリー18とを有するコンベア12におけるベルトスリップ検出方法であって、従動プーリー18の回転数である実機回転数を求める実機回転数算出工程と、モータ22に対する指令回転数を求める指令回転数算出工程と、前記実機回転数と前記指令回転数との比較値に基づいて、ベルトスリップの有無を判定する判定工程とを有することを特徴とする。
(もっと読む)
ベルト搬送装置
【課題】エンドレスベルトの停止位置を正確に測定できるベルト搬送装置を提供する。
【解決手段】駆動プーリ10によって所定方向に所定量送られて停止するエンドレスベルト14と、搬送物が載置されることのない領域に穿設された所定形状の透孔と、エンドレスベルト14の送りが停止したとき、エンドレスベルト14の引張側14aとなる所定位置に位置する前記透孔を挟むように設置され、投光部18aと、受光部18bとから成るセンサ18と、受光部18bでの今回の受光量と前回受光した受光量との偏差値を、エンドレスベルト14の今回送り量に加味して次回送り量を設定し、エンドレスベルト14の送り量を次回送り量となるように、駆動プーリ10を制御する制御部22とを具備することを特徴とする。
(もっと読む)
仕分け設備
【課題】横桟の位置ずれが大きい場合でも正常位置に戻し得る仕分け設備を提供する。
【解決手段】無端ベルト体44の上下面の各前後に配置された横桟45により書籍の案内空間部Sが設けられた仕分けコンベヤ31における横桟の位置ずれを修正するための位置ずれ修正装置101を書籍の供給位置よりも上手側に配置し、この位置ずれ修正装置を、仕分けコンベヤに設けられた被検出板体102を検出して当該コンベヤを検出し得る検出センサ103と、当該検出センサから所定距離だけ下手側に配置されて仕分けコンベヤの下面の横桟を検出する横桟検出手段104と、前記検出センサからの検出信号を入力して前記横桟検出手段に検出動作信号を出力する検出動作指示部113と、前記横桟検出手段からの出力信号を入力して横桟が位置ずれしていると判断した場合に、回動力付与手段61に作動信号を出力して横桟の位置ずれを無くすための位置ずれ修正指示部114とを具備したもの。
(もっと読む)
物品搬送装置
【課題】 物品を搬送方向の前後から挟む搬送爪(82)(82)が並列状態の二本のコンベヤチェーンに各別に取付けられた搬送コンベヤを有する物品搬送装置において、障害物の衝突やコンベヤチェーンの経年的な伸びによって前後爪(27a)(27b)(17a)(17b)の間隔が変化してもこれを自動的且つ正確に計測できるようにする。
【解決手段】 前記搬送方向に直角で且つ前記搬送コンベヤの幅方向に延びる直線状の爪監視エリアを通過する前記各搬送爪(82)(82)を検知して該各搬送爪(82)(82)に各別に対応する爪検知信号を出力する爪監視手段(86)と、第1番目の搬送爪(82)とこれに続く第2番目の搬送爪(82)が前記爪監視エリアを通過した際に前記爪監視手段(86)が出力する2つの爪検知信号の時間的なずれの間に前記搬送コンベヤが走行した走行距離を計測する走行距離計測手段を具備させたこと。
(もっと読む)
1 - 5 / 5
[ Back to top ]