
国際特許分類[B65G47/32]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | コンベヤによって移送中物品の相対的位置または姿勢を変える装置 (851) | 物品を整列させるもの,例.個々の物品間の間隔を変えるもの (568) | 一連のコンベヤによる移送中に行うもの (328) | 移送装置の適用 (2)
国際特許分類[B65G47/32]に分類される特許
1 - 2 / 2
包装機における物品供給装置
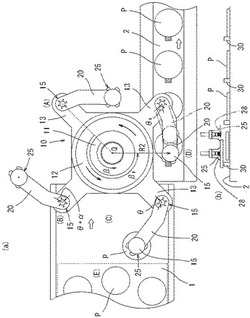
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
容器搬送装置

【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
1 - 2 / 2
[ Back to top ]