
国際特許分類[B65G47/52]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | コンベヤ間で物品または物質を移送する装置,すなわち排出または供給装置 (711)
国際特許分類[B65G47/52]の下位に属する分類
互いに交差しているコンベヤ間で行なうもの (106)
傾斜または垂直コンベヤ部まで,または前記部から行うもの (18)
吊り下げられたコンベヤまで,またはコンベヤから行うもの,例.トロリー型のもの (28)
分岐コンベヤ (35)
固定プラットホームまたは櫛状のもの,例.コンベヤ間の橋 (3)
一つのコンベヤからくる物品を受け入れ,それらの物品を二つ以上のコンベヤにそれぞれ移送するのに用いるもの,または逆も同様,例.二つ以上のコンベヤによって運ばれる物品の流れの結合 (191)
物質をばらで一つのコンベヤから数個のコンベヤへの移送,またはその逆も同様 (6)
国際特許分類[B65G47/52]に分類される特許
101 - 110 / 324
無人搬送車及び無人搬送車による部品供給方法
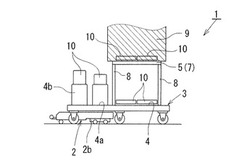
【課題】無人搬送車の搬送経路に有人作業工程及び自動作業工程が混在する場合、両工程においてスムーズに部品を供給することのできる無人搬送車を提供する。
【解決手段】本無人搬送車1は、作業者により部品を搬出する有人作業工程専用の第1部品収容台4と、自動で部品を搬出する自動作業工程専用の第2部品収容台5とを備えたので、無人搬送車1の搬送経路に有人作業工程及び自動作業工程が混在しても、両工程においてスムーズに部品10を供給することのできる。
(もっと読む)
搬送システム

【構成】 第1の支持手段により物品を支持して搬送する第1の搬送車を設ける。第1の搬送車の走行ルートと平行な区間を含む周回軌道に沿って周回走行すると共に、平行な区間で第1の搬送車と同期して等速走行自在で、かつ第1の支持手段とは異なる箇所で物品を支持する第2の支持手段と、第2の支持手段を昇降させるリフタとを備えた移載装置を設ける。
【効果】 搬送車を停止させずに物品を受け渡しでき、また複雑な走行ルートでも、搬送車の分岐走行を不要にする。
(もっと読む)
基板搬送方法、姿勢変換装置および基板搬送装置
【課題】互いに直交した搬送経路に沿って基板を傾斜姿勢で搬送しながらより少ないスペースで効率良く基板の搬送方向を転換できるようにする。
【解決手段】姿勢変換装置22は、支持テーブル221とこのテーブル221を揺動させる揺動機構とを含む。揺動機構は、テーブル上面が特定方向から見て傾斜しかつ当該方向に傾斜姿勢で搬送される基板Sを受入れる基板受入れ姿勢と、テーブル上面が特定方向と直交する方向から見て傾斜しかつテーブル上に支持した基板Sを当該方向に傾斜姿勢で送り出す基板受渡し姿勢とに亘って支持テーブル221を揺動させる。基板受渡し姿勢は、基板受入れ姿勢で受入れた基板Sの先頭側の辺S1を一辺として基板S上に形成した仮想正方形の対角線のうち当該基板Sの先頭下位側の頂部を通る対角線と平行な軸回りに辺S1が前記直交方向と平行となる位置まで基板Sを回動させた姿勢とされる。
(もっと読む)
物品搬送装置
【課題】物品の移動距離を任意かつ容易に変更できる物品搬送装置を提供する。
【解決手段】物品搬送装置10は、物品Wを搬送する第1コンベヤ11と、物品Wを第1コンベヤ11の搬送方向とは反対の方向に搬送する第2コンベヤ12とを備える。物品搬送装置10は、第1コンベヤ11に沿って移動可能で物品誘導面31aを有する第1誘導体31を備える。第1誘導体31が第1コンベヤ11に沿って移動して任意位置に停止した状態で、物品Wが物品誘導面31aに摺接しながら第1コンベヤ11上から第2コンベヤ12上に移動する。
(もっと読む)
降下搬送機
【課題】物品の供給位置で正確に停止及び発進を繰り返し、揺れや振動、騒音を発することなく静かに周回走行する、重力を利用した降下搬送機を提供する。
【解決手段】降下搬送機1は、枠体10の上部及び下部に対をなす輪体21、22と、輪体21、22に張架される無端条体30と、無端条体30に保持される搬送台40を備え、また、停止装置50と減速装置60を備える。減速装置60は、減速装置回転軸、減速歯車、ロータリーダンパーを備える。また、停止歯車及び/又は減速歯車が回転軸にワンウエイクラッチを介して取り付けられる。
(もっと読む)
栽培設備
【課題】殺菌釜の内部と殺菌釜の外部との間で手間をかけずにパレットを出し入れできる培養設備を提供すること。
【解決手段】栽培容器が複数載置されているパレットを出し入れする出し入れ口18、20と、この出し入れ口を開放する開き位置と閉鎖する閉じ位置とに位置変更自在な開閉扉19、21とが設けられた殺菌釜103の内部にてパレットを搬送する釜内搬送手段TINa、TINbと殺菌釜の外部にてパレットを搬送する釜外搬送手段TEXa、TEXbとが、開閉扉が開き位置で出し入れ口を通してパレットを搬送可能に構成され、釜外搬送手段の出し入れ口側の端部部分16、17が、釜外搬送手段及び釜内搬送手段とがパレットを搬送可能となる通常位置と開閉操作される開閉扉と干渉しない退避位置とに移動自在に構成され、端部部分を移動させる移動手段22、23が設けられている栽培設備。
(もっと読む)
中継テーブル及び中継テーブルを備えた搬送装置。
【課題】施設内のスペースを活用しつつ、被搬送物の品質低下や搬送経路上からの位置ずれ、脱落等が生じることなく、被搬送物を円滑に搬送することができる中継テーブル及びこれを備えた搬送装置を提供する。
【解決手段】上流側搬送路1と、上流側搬送路1の搬送方向と異なる方向に被搬送物を搬送する下流側搬送路2との間に設置される中継テーブル20であって、当該中継テーブル20が上流側搬送路1によって搬送される被搬送体の移動を規制するストッパ60と、ストッパ60により規制された被搬送物を下流側搬送路2に押出すプッシャ80とを備え、ストッパ60がプッシャ80により押出される被搬送体の押出し方向と同方向に回動する回転体としてのローラ体を備える構成とした。
(もっと読む)
スクリュー駆動の搬送装置
【課題】搬送台車駆動用スクリューシャフト間の空隙部の存在に関係なく、搬送台車を円滑に連続走行駆動させるようにすること。
【解決手段】スクリューシャフト間空隙部5の一方に位置するスクリューシャフト1Bの前記空隙部5に隣接する端部の横側方には、スクリューシャフト1Bと連動回転駆動され且つ送りピッチが前記スクリューシャフト1Bの送りピッチと同一の短い補助スクリューシャフト6Bが並列状に配置され、搬送台車には、スクリューシャフト1Bに係合する従動ローラー14と補助スクリューシャフト6Bに係合する補助従動ローラー16とが、スクリューシャフト軸方向に位置をずらして設けられ、これら両ローラー14,16間のスクリューシャフト軸方向の間隔D及び補助スクリューシャフト6Bの長さは、従動ローラー14が前記空隙部5を移動する間、補助従動ローラー16が補助スクリューシャフト6Bに係合しているように設定された構成。
(もっと読む)
搬送走行車システム
【課題】周回軌道において搬送走行車がショートカット可能な搬送走行車システムを提供する。
【解決手段】搬送走行車システム1は、周回軌道3と、トラバーサ台車19と、搬送走行車5とを備えている。周回軌道3は、軌道が平行に配置された部分である直線部7を少なくとも有する。トラバーサ台車19は、一対の直線部7間で移動可能である。搬送走行車5は、トラバーサ台車19によって一対の直線部7間を移動させられた場合に、前後方向を切り替えた状態で走行可能である。
(もっと読む)
搬送システム、走行車
【課題】単数の測距装置で走行車の位置と姿勢を測定する。
【解決手段】ステーション110と、目標位置に目標姿勢で停止する走行車140と、荷物を移載する移載手段170とを備える搬送システム100であって、ステーション110と走行車140との距離を測定する測距手段141を単数と、測距手段141の測距対象となる第一測距部111、及び、第二測距部112と、第一測距部111との第一距離を取得し、走行車140を所定距離かつ所定方向に走行させ、第二測距部112との第二距離を取得する制御部151と、前記第一距離と前記第二距離とに基づき走行車140の目標姿勢からの傾きである傾き値を算出する算出部152と、傾き値に基づき移載手段170の移載条件を決定する移載条件決定部153とを備える。
(もっと読む)
101 - 110 / 324
[ Back to top ]