
国際特許分類[B65G47/90]の内容
処理操作;運輸 (1,245,546) | 運搬;包装;貯蔵;薄板状または線条材料の取扱い (154,615) | 運搬または貯蔵装置,例.荷積みまたは荷あげ用コンベヤ;工場コンベヤシステム;空気管コンベヤ (20,388) | コンベヤに関連して物品または物質の取り扱い装置;そのような装置を用いる方法 (3,876) | 特定の種類または型の供給,移送,または排出装置 (1,152) | 物品または物質の取り上げかつ置くための装置 (371)
国際特許分類[B65G47/90]の下位に属する分類
空気式,例.吸引式,クリツパと協働するもの (140)
静電気または磁石グリッパーと協働するもの (12)
国際特許分類[B65G47/90]に分類される特許
1 - 10 / 219
物品搬送方法及び物品搬送装置
【課題】物品や容器のサイズ或いは容器内への物品の詰め合わせ状態などに応じた複数の物品の供給形態に対応可能な物品搬送方法及び物品搬送装置を提供する。
【解決手段】所定間隔毎に搬送される物品搬送コンベヤ2上の複数の物品1を吸着手段で吸着し、所定間隔毎に搬送される容器搬送コンベヤ4の第一コンベヤ5上の容器3に各物品1を載置して該容器3と共に搬送する際に、指定手段により第一の制御プログラムに切り替えられた状態では複数の物品1の夫々に対応した位置に配備された吸着具が各物品1を夫々吸着してまとめて容器3の一つに載置し、また、指定手段により第二の制御プログラムに切り替えられた状態では物品1を夫々吸着している吸着具の間隔を容器搬送コンベヤ4の第一コンベヤ5上の複数の容器3の間隔に合わせて該複数の容器3に夫々の物品を載置する。
(もっと読む)
ワーク移載装置

【課題】給材位置からアライメント位置に移載されるワークを、一連の移載動作に影響を与えることなくアライメントすることができるワーク移載装置を提供する。
【解決手段】ファイバーセンサー35a〜35dを有するラベルアライメント部24を設け、ロボットアーム27の先端の吸着ユニット23をラベルアライメント部24上で斜め方向にスキャンさせ、検出信号が取得されたときの座標を記憶する。ファイバーセンサー35a〜35dのうち、3点のファイバーセンサーの検出信号が取得されたら、この3点の座標に基づいて、ズレ量を求め、貼り付け座標の補正値を算出し、この補正値に基づいて、貼り付け座標を補正しながら、ラベル12をテープカートリッジ11に貼着する。
(もっと読む)
パン型造粒機用の大塊処理装置
【課題】パン型造粒機において、その運転中に自動的に大塊を除去することが可能な塊処理装置を提供する。
【解決手段】回転して粉体を造粒するパン23が備えられたパン型造粒機21用の大塊処理装置1であって、大塊を掬い上げる掬上げ治具3と、先端に掬上げ治具3が着脱自在に取り付けられ、パン23の回転方向に沿って掬上げ治具3をパン23に挿入させて大塊を掬い上げさせるロボットアーム2と、を具備してなることを特徴とするパン型造粒機用の大塊処理装置1を採用する。
(もっと読む)
搬送装置
【課題】主軸方向に搬送される被搬送物の軌跡の正確性を向上させる搬送装置を提供する。
【解決手段】副軸方向に延在し、レーザ加工ヘッド2を副軸方向に移動可能に保持する副軸フレーム3と、副軸方向と交差する主軸方向に延在し、副軸フレーム3を主軸方向に移動可能に保持する一対の主軸フレーム4a、4bと、を備え、レーザ加工ヘッド2を主軸方向及び副軸方向に搬送する搬送装置1であって、副軸フレーム3に副軸方向に移動可能に保持され、レーザ加工ヘッド2とは副軸フレーム3の副軸方向における中心線CCを挟んで反対側且つ副軸フレーム3の主軸方向における反対側の位置においてレーザ加工ヘッド2の副軸方向の移動に対して反対方向に移動するカウンタウエイト6を備えた。
(もっと読む)
位置決め機構、位置決め方法および移載装置
【課題】部品の位置決めを行い移載する移載装置において、位置決めの基準となる辺に位置決めする部品を当接し位置決めを行う位置決め駆動機構を用いること無く、位置決め治具と部品とを当接させて部品を摺動させることで位置決めを行う位置決め機構と、この位置決め機構を搭載する移載装置を提供する。
【解決手段】部品が嵌合される切り欠け形状からなる嵌合部と、嵌合部の最深となる内底辺部と、内底辺部の両端に交わる内側辺部とを有し、内底辺部の幅と比較して切り欠け形状の開口部の幅が広い位置決め治具を備え、部品を開口部から内側辺部に沿って嵌合部に嵌合し、位置決めの基準となる内側辺部と内底辺部とに部品の外縁を水平方向に当接させることで、内側辺部と内底辺部とに倣って部品を水平方向に摺動させて位置決め機構を備える。
(もっと読む)
ロール体搬送装置
【課題】ロール体の受け取りをよりスムーズに行う。
【解決手段】ロール体搬送用無人搬送車100は、ターレットによって空中に支持されているロール体の胴部に鉛直方向下側から接触する載置台102と、載置台102にかかる荷重を検出する荷重検出部と、荷重検出部によって検出される荷重に基づいて、載置台102がロール体を押す力を調整する荷重調整部と、を備える。荷重調整部は、荷重検出部によって検出される荷重がロール体の重量に近づくように、載置台102がロール体を押す力を調整する。
(もっと読む)
ピックアップ装置
【課題】上下方向に複数枚のトレイが積み上げてのその積層体が傾いても、最上段のトレイを安定して順次ピックアップしていくことができるピックアップ装置を提供する。
【解決手段】上下方向に積み重ねられた複数のトレイ11に対して、その最上段トレイ11Aをピックアップするピックアップ装置である。上下方向に積み重ねられた複数トレイ11が載置される昇降台12と、昇降台12の上昇によって上昇してきた最上段トレイ11Aを保持する複数のトレイ保持機構13と、水平面に対する最上段トレイ11Aの傾斜に対応して各保持機構位置を上下方向に変位させる倣い機構14とを備える。
(もっと読む)
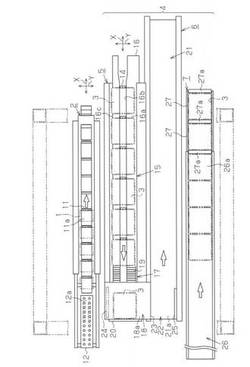
物品処理装置
【解決手段】 直列に配置された分割コンベヤ3A〜3C毎にそれぞれロボット4A〜4Cが設けられている。各ロボットは各分割コンベヤに供給された物品を、例えば10本を一まとめとしてバケットコンベヤ5の1つのバケット5a内に受け渡すことができるようになっている。各分割コンベヤは、搬送コンベヤ2から多くの物品が供給されている状態ではそれぞれ連続して運転されているが、各分割コンベヤへの物品の供給がなくなると停止されるようになっている。各分割コンベヤは、物品が新たに供給される都度間欠的に運転され、それによって各分割コンベヤ上に所定数の物品を貯溜させるようになる。各割コンベヤ上に所定数の物品が貯溜されたら、該物品は一まとめとしてバケット内に受け渡される。
【効果】 各割コンベヤ上に所定数の物品を貯溜することができるので、各ロボットによる所定本数ずつの処理を効率的に行える。
(もっと読む)
ワーク保持装置
【課題】測定や加工等を行う装置に対し、ワークの受け渡しを容易に行なえるようにしたワーク保持装置を提供する。
【解決手段】円柱型のワークWの両端面を挟持し保持するワーク保持装置1であって、ワークWの両端面を挟持する一対のチャック部5,5を備える。一対のチャック部5,5の各々に対し、ワークWの端面の内側面ではなく該内側面の外側に位置する外側面のみを挟持できるようにコ字型部18を形成し、一対のチャック部5,5のコ字型部18でワークWの端面の外側面を挟持できるようにする。ワーク保持装置1からワーク測定装置19にワークWを受け渡す際、ワーク測定装置19のワーククランプ軸21,21でワークWの端面の外側面でなく内側面を挟持させ、ワーク保持装置1からワーク測定装置19へワークWを容易に受け渡すことが可能となる。
(もっと読む)
表面処理における基板移送装置及び方法
【課題】表面処理用の移送装置にて被処理基板の両端部をチャックして、前記被処理基板を処理部に入れたり処理部から出したりする際、被処理基板が撓んだ状態になるのを防止する。
【解決手段】基板移送装置3のフレーム22の第1方向に離間して設けられた一対のチャック部30,30にて、被処理基板9の第1方向の両端部をそれぞれチャックする。このチャック状態で、張り付与手段27によって、少なくとも一方のチャック部30を他方のチャック部とは反対側に付勢する。そのうえでフレーム22を処理部1に出し入れする。
(もっと読む)
1 - 10 / 219
[ Back to top ]