
国際特許分類[B66C17/00]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | クレーン;クレーン,キヤプスタン,ウインチまたはタツクル用の荷物係合要素または装置 (4,090) | 実質上水平な一本または複数本のガーダーをもち該ガーダーの端部が間隔をもった支持部材に保持された軌条に車輪またはローラにより直接支持されている天井走行クレーン (81)
国際特許分類[B66C17/00]の下位に属する分類
荷物係合装置,例.磁石,フック,を支持するためのもち上げ用ビーム,例.旋回ビーム,を有するもの (16)
特別の目的,例.鋳造工場用,鍛造工場用,に特別に適合せしめたもの;特別の目的に役立つ補助の装置を組み合わせたもの (11)
国際特許分類[B66C17/00]に分類される特許
31 - 40 / 54
日本型木造家屋用薄型介護クレーン

【課題】工場で使う一般的な天井クレーンの方式を一般的日本家屋の部屋で利用して、歩行困難なお年寄り、または、体の不自由な人の生活補助や介護用として利用しようとするものであり、天井クレーン全体の軽量化、クレーンの高所格納、広範囲移動を実現する。
【解決手段】一般的な天井クレーンに採用されているサドル2をガーダ1の側面に変更することによりガーダ1+サドル2の上下の幅を薄くすることができるので、その分クレーンの格納場所も高所に設定でき、軽くもなる。
(もっと読む)
走行クレーンの操作制御装置

【課題】手元を注目することなく、片手で素早く的確に操作でき、且つ巻上下の無段速変速、微細な速度制御ができる走行クレーンの操作制御装置を提供することを目的とする。
【解決手段】指令信号生成部21は、加速度センサ16で検出した操作筐体の傾き方向と傾き角度から巻上下信号と巻上下速度信号を生成し、昇降決定押釦スイッチ15から昇降決定信号S15により該巻上下信号と巻上下速度信号をモータ駆動制御回路部30に出力し、ジャイロセンサ17で検出した操作筐体方向と走行・横行決定押釦スイッチ13からの信号で操作筐体方向、その反対方向、操作筐体方向に直交する両方向への移動指令信号とその速度信号を生成し、駆動制御するモータ駆動制御回路部30に出力し、走行モータ41、横行モータ42、昇降モータ43を運転する。
(もっと読む)
走行クレーンの操作制御装置、操作制御方法
【課題】手元を注視することなく、片手で素早く的確に操作でき、且つ巻上下の無段速変速、微細な速度制御ができる走行クレーンの操作制御装置及び方法を提供すること。
【解決手段】操作装置制御回路部10、モータ駆動制御回路部30を備え、指令信号生成部21は、加速度センサ16からの操作筐体の傾き角度を3つの傾き範囲に区分し、動作決定無段速押釦スイッチ15からの動作決定信号S15を条件として、第1傾き範囲では走行モータ41及び横行モータ42への走行・横行指令信号、速度信号指令信号を生成して走行・横行運転のみを行い、第2傾き範囲では走行・横行指令信号、及び加速度センサ16からの操作筐体の傾き方向により昇降モータ43への上昇又は下降の指令信号、速度信号指令信号を生成して走行、横行、昇降運転を行い、第3傾き範囲では上昇又は下降指令信号、速度指令信号を生成して昇降運転のみを行う。
(もっと読む)
天井クレーン
【課題】荷の積載量及び昇降距離に影響されない荷の振れ止めを可能にして作業効率の向上と自動化を達成するとともに荷の吊り上げ上限が制限されることのない天井クレーンを提供する。
【解決手段】走行機構23、横行機構24、巻上機構25を有する天井クレーンにおいて、巻上機構25の滑車252で吊られた荷の振れを止める振れ止め機構26を備え、この記振れ止め機構26を、横行機構24に回転可能に設けられた補巻胴261と、補巻胴261に巻取り及び巻出し可能に巻回され巻出し端が滑車252に連結された金属板材からなる振れ止め用帯状体262と、滑車252の昇降に連動させて補巻胴261を振れ止め用帯状体262の巻取り及び巻出し方向に駆動する補巻モータ263とから構成した。
(もっと読む)
台形状のストロングバックビームシステムを含むリフトアセンブリ
ブリッジクレーンアセンブリ、台形状のストロングバックビームシステム、及びブリッジクレーンアセンブリのためのキャリッジが開示される。いくつかの実施形態によれば、ブリッジクレーンアセンブリは、台形状ビームと、台形状ビームの下側に取り付け可能なブリッジと、を備えている。ブリッジは、クレーンアセンブリのためにリフト装置を支持するための取り付け手段を備えている。少なくとも一つガイドトラックが支持構造に取り付け可能であり、少なくとも一つのキャリッジが、少なくとも一つガイドトラックに沿って長手方向に移動可能である。各キャリッジは、1対の間隔を隔てた装着プレートと、実質的に鉛直な向きに、装着プレートに回転可能に装着された複数のローラと、を備える。軸が装着プレートの間に延在しており、且つピボット的に固定されている。変位アームが、軸にピボット的に結合された第1の端と、ブリッジに対するピボット的接続のための少なくとも一つの第2の端と、を有している。 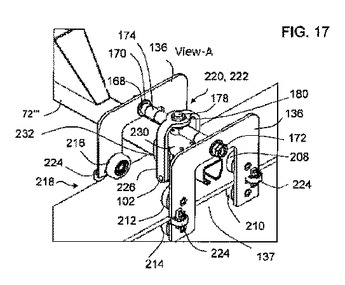 (もっと読む)
(もっと読む)
クレーン
【課題】トロリとサドルとを多芯の太いキャブタイヤケーブル等で連結することなく、トロリとサドルとを安定して確実に操作する。
【解決手段】クレーンは、一対のサドルレール2に沿って移動する一対のサドル1と、このサドル1に両端を連結しているトロリレール4と、このトロリレール4に沿って配線されてなる複数のトロリー線6と、トロリー線6に接触しながらトロリレール4に沿って移動するトロリ3と、サドル1に制御信号を伝送する操作部30とを備える。トロリー線6は、電力を供給する電力ライン6Aと、予備ライン6Bとを備える。クレーンは、サドル1内に、操作部30から入力される制御信号でもって搬送波を変調して予備ライン6Bに出力する送信機8を内蔵すると共に、トロリ3には予備ライン6Bに出力される搬送波を受信して制御信号を検出する受信機9を内蔵しており、送信機8の出力を受信機9で受信してトロリ3を制御している。
(もっと読む)
クレーン誤操作防止装置
【課題】 指示した動作内容を動作が始まる前に確認でき、誤操作に対し早期に対応し、事故の発生を抑制し得るクレーンを提供する。
【解決手段】 動作を行う本体3、トロリ5およびフックブロック7と、これらの作動を制御する制御盤37と、それぞれ別個の動作を指示する複数の押釦を有し、該押釦を作動して制御盤37へ動作指示信号DSを送信するペンダントスイッチ43と、を備えるクレーン1であって、制御盤37およびペンダントスイッチ43の間に誤操作防止制御盤39が介装され、誤操作防止制御盤39は、動作指示信号DSの動作内容を継続時間Tkの間、音声による音声通報を行い、該音声通報の終了後に動作指示信号DSを制御盤37へ伝送するように構成されていることを特徴とする。
(もっと読む)
ダブル主桁多点吊りクレーン
本発明はダブル主桁多点吊りクレーンに関するもので、主桁、吊り上げ機構、平行移動機構、電気制御システムを含み、その特徴は、下記のようなものである。前記主桁は、それぞれ変断面のある、段差式に配置されたダブル主桁であり、3つ箱桁の高アスペクト比合成梁である。吊り上げ機構は複数基の巻き上げシステムにより構成されていて、各基の巻き上げシステムにそれぞれに複数の吊り点が設けられ、且つ電気制御システムにより前記すべての吊り点を同期させて駆動する。前記巻き上げシステムにはロープ配列機構を据え付けており、かつ直列多層ロープ巻き取りシステムを採用している。平行移動機構は、低位置主桁の両端部に設けられた主桁自走式両方向平行移動機構である。電気制御システムは多点吊りクレーン不静定システム電気制御システムである。
本発明のクレーンは特大吊り上げ荷重、特大吊り上げ高度及び特大スピンの特徴があり、海上石油プラットフォームの大型のブロックの吊り上げ、組立及びドッキングに適用でき、石油プラットフォームの製造方式の変更を促進し、社会に巨大な効果と利益をもたらすこととなり、中国および世界の海洋工程のプロジェクトに深い影響を与える。
(もっと読む)
クレーン用車輪ユニット及びこれを用いた天井クレーン
【課題】走行レールに沿って巻上機を搭載した前後2つの横行フレームを移動する際に、円滑で安定した走行が可能であり、同時にその構造が小型コンパクトであるクレーン用車輪ユニットを提供する。
【解決手段】所定間隔で配置された左右一対の走行レールに沿って巻上装置を移動する車輪ユニットあって、上記巻上装置を搭載した揚重フレームに連結されたサドルフレームと、上記サドルフレームに軸承された複数の走行車輪と、上記走行車輪を駆動する駆動手段とを備える。上記サドルフレームはそれぞれ上記揚重フレームに連結され上記走行レールに沿って所定長さを有する複数のフレーム部材で構成し、この複数のフレーム部材は、(1)それぞれに上記走行レールに沿って前後に複数の走行車輪を軸承し、(2)上記走行レールに沿って走行方向前後に直列となるように配置し、(3)互いに前後隣接する端部がレール踏面に対して上下方向に回動可能に軸連結する。
(もっと読む)
走行台車の取扱方法及び取扱装置
【課題】
建屋内の高所に既設の天井クレーンを用いて新設の走行台車を設置或いは取り外す際の取扱いを容易且つ迅速に行えるようにする。
【解決手段】
建屋上部の走行用レール3に新走行台車1を設置する際に、新走行台車1を天秤2の架台6上に搭載し、その天秤2に錘7を付けて水平にバランスさせた状態で既設の天井クレーン11で天秤2ごと新走行台車1を吊上げ、新走行台車1の車輪4が走行用のレール3よりも高い位置に到達した時点で新走行台車1の車輪4を走行用のレール3の真上に突き出し、その後に天秤2を天井クレーン11によって降下させ、天秤2からレール3へ新走行台車1を移し変えて設置する。レール3から新走行台車1を取り外す作業は先の設置とは逆手順による。
(もっと読む)
31 - 40 / 54
[ Back to top ]