
国際特許分類[B66D1/40]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | キヤプスタン;ウインチ;タックル,例.プーリ・ブロック,ホイスト (784) | ロープ,ケーブル,またはチェーンの巻上装置;キヤプスタン (546) | 他の構造上の細部 (273) | 制御装置 (167)
国際特許分類[B66D1/40]の下位に属する分類
国際特許分類[B66D1/40]に分類される特許
1 - 10 / 16
荷重巻上げワイヤーロープ用のドラム張力印加方法及び装置
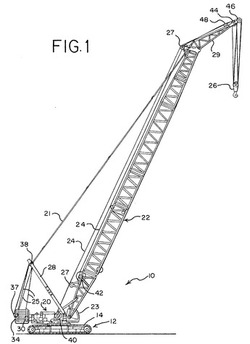
【課題】対象物を降ろさなければならない場合の持上げを、必要な作業現場のクレーンが実行することを可能にするロープ張力システム。
【解決手段】ドラム張力印加方法は、前記荷重巻上げライン24の第1端部が第1ドラムに連結され、前記荷重巻上げラインの第2端部が第2ドラムに連結され、前記荷重巻上げラインがブームシーブとフックブロック26を通して掛け回される。引止め力を第2ドラムに加えるステップと、第2ドラムへの引止め力より大きい巻回力を第1ドラムに加えるステップと、フックブロックの移動を制限しながら、巻上げ力と引止め力を加えるステップとを含み、それにより、荷重巻上げラインを、第2ドラムからブームシーブとフックブロックを通り第1ドラムまで荷重巻上げラインの張力を維持しながら巻き取り、その結果荷重巻上げラインが、あらかじめ第2ドラムに巻回されていたものよりも大きい張力で第1ドラムに巻回される。
(もっと読む)
車椅子用ウインチ装置

【課題】ウインチ装置を左右に分離して設置することで、比較的狭い車室内のスペースの有効活用を図り、少しでもスペースの確保を図り、また、利用者や介護者の邪魔にならないようにすること。
【解決手段】車椅子をスロープを介して引き上げたり引き下ろしたりするためのベルト11と、前記ベルト11が巻回されるドラムと、前記ドラムを正逆転に回転させて前記ベルト11を引き出し方向または巻き取り方向に作動させるモータ31とでウインチ装置12を構成している。そして、ウインチ装置12は、左右に分けて設置すると共に、該左右に分けて設置したウインチ装置からそれぞれベルトを引き出し、巻き取り可能としている
(もっと読む)
クレーンの巻上げギヤを制御するためのクレーン制御器
【課題】クレーンの巻上げギヤを制御するためのクレーン制御器に関するものであって、動的荷重を考慮した改良されたクレーン制御器を提供する。
【解決手段】クレーンの巻上げギヤの制御において、巻上げロープの弾性に起因する動的振動を考慮して、該動的振動を低減させるように巻上げギヤを適切に制御するもので、該巻上げギヤの駆動速度をオーバーシュートを抑制するために最大許容駆動速度に制限する。この最大許容駆動速度はクレーンデータを基に動的に決定される。
(もっと読む)
ケーブルリールの制御装置、ケーブルリールの制御方法、及び、タイヤ式クレーン
【課題】ケーブルリールによって走行する走行車両と外部との間で、作用する張力を安定させつつケーブルの巻き取り及び巻き出しを行わせることが可能なケーブルリールの制御装置、ケーブルリールの制御方法、及び、タイヤ式クレーンを提供する。
【解決手段】ケーブルリール5の制御装置20は、モータ5bによって発生させるトルクであるモータ発生トルク値とモータ5bによって実際にドラムを回転動作させているトルクであるドラム作動トルク値との差分に基づいてケーブルに作用している張力である張力推定値を演算する張力演算手段21と、張力演算手段21で演算された張力推定値に基づいて、ケーブルに作用する張力を予め設定された張力設定値とするのにモータ5bで発生すべきトルクであるトルク指令値を演算し、出力するモータトルク演算手段22とを備える。
(もっと読む)
ホイスト制御装置及び揚重設備
【課題】防爆が必要な場所において、防爆リミットスイッチ以外に電気機器を使用することなく、複雑な検出手段を用いることなく、複数のホイストのロープに加わる荷重の検出及びその合算を簡単な構成で行い、ロープ相互間のずれを調整して揚重設備を所望の状態に自動制御可能なホイスト制御装置を提供する。
【解決手段】本発明は、二台のホイストの各減速機の出力軸に固定されその回転反力によってロープ繰出し方向へのみ回転動作する第1及び第2のトルクアームと、各トルクアームの回転力を伝達する第1及び第2の油圧機構と、ガイド棒24、25、34、35に沿って移動自在で第1及び第2の入力側シリンダ23A、23Bからの伝達力と所定のばね力に抗して移動する第1及び第2の駆動部材26、36と、各駆動部材26、36の動作でオン/オフが切換可能な第1〜第3のリミットスイッチ31〜33とを備え、各リミットスイッチ31〜33にて得られた結果に基づいて原動機の動作を制御する。
(もっと読む)
クレーンの制御方法
本発明は、クレーンの制御方法に関するもので、クレーンのフックに接続されたロープ部分(13)の摩擦作動式駆動ホイール(3)による制御を含み、余分のロープを収納リール(12)に複数層に巻き付ける。本方法では、2つの機械装置(1、2)を使用し、それらのうち第1のもの(1)を駆動ホイール(3)用とし、他方のもの(2)を収納リール(4)用として、一方の機械装置(1、2)を速度指令により、他方の機械装置(1、2)をトルク指令により制御する。 (もっと読む)
複数吊りポイントクレーンの電気制御方法
本発明は複数吊りポイントクレーンの電気制御方法及び設備を提供する。本発明の制御方法は下記のステップを備える。a、準備モードである。高低圧配電システム、主駆動システム、制御システムなどは故障があるかどうかを検出する。b、ワイヤロープのプリテンションモードである。この場合、各吊り上げモーターはトルク制御を採用し、インバータートルクのプリセット値を確定し、ロードセルによりテンションするかどうかを判断できる。c、ホバリングモードである。各吊り上げモーターは速度制御を採用し、制御器によりモーターのトルクの幅制限値を設定し、荷重を吊り上げ、吊り物の重心を算出する。d、共同で吊り上げるモードである。各吊り上げモーターは速度制御を採用し、モーターのトルクの幅制限はホバリングモードと同一であり、リアルタイムに監視して修正することにより吊り物を平穏に吊り上げることができる。該電気制御方法により自動化操作の制御レベルおよび作業の効率が向上され、人工操作の誤りが減少されるようになる。該技術が各種の同期制御を採用するクレーンに適用され、幅広く応用できる。 (もっと読む)
複数台で運転をする電気ホイスト
【課題】二台の電気ホイストによる共吊りにおいて各々のロードブロック位置ずれによる吊り荷の傾きを少なくする電気ホイストを提供すること。
【解決手段】吊り荷を上げ下げするインバータ制御の電気ホイストにあって、エンコーダによるモーター回転時の出力パルスを使用した移動距離認識によるロードブロックの位置制御だけではなく電気ホイストとロードブロックの距離を直接認識して制御を行い、ワイヤーロープの伸びやドラムの外径の違いによる位置ずれを補正し得るための手段として、ロードブロックにセンサーを備え、かつ直接認識した距離情報を制御回路に伝達するために無線を用いたことを特徴とする。本発明によれば吊り荷の傾きを防止してバランスを崩すことなく精度の良い共吊り作業を行なうことができる。
(もっと読む)
クレーン
【課題】特殊なロープを使用することなく、構成を簡略化しながら、クレーンへのロープの取り付け作業が煩雑になるのを回避し、かつ、両シーブブロック同士をほぼ平行状態に維持しながらこれらシーブブロック間の距離を変化させる。
【解決手段】第1ロープ11は、ブーム側シーブ14a,14bの配列に沿って1つ置きに選ばれるブーム側シーブ14aと吊荷側シーブ15a,15bの配列に沿って1つ置きに選ばれる吊荷側シーブ15aとに交互に掛け渡されることにより、吊荷部16の重心部を通る鉛直線を挟んで両側に位置するブーム側シーブ14aと吊荷側シーブ15aに巻回され、第2ロープ12は、第1ロープ11が掛けられていないブーム側シーブ14bと吊荷側シーブ15bとに交互に掛け渡されることにより、吊荷部16の重心部を通る鉛直線を挟んで両側に位置するブーム側シーブ14bと吊荷側シーブ15bに巻回されている。
(もっと読む)
共吊クレーンの協調搬送制御装置及び共吊クレーンの協調搬送制御方法
【課題】複数のクレーンの動作を制御し複数のクレーンにより単一の搬送物を吊り下げて搬送する共吊クレーンの協調搬送制御装置において、作業者のミス等により搬送が失敗する虞れなく、動作指令の生成を容易とし操作の効率を向上させ、搬送物の揺れを抑えるとともに、並進運動のみならず回転運動をも行なうクレーンを用いる場合にも適用できるようにする。
【解決手段】複数のクレーン1,2のうちの一は、作業者の操作によって動作するリーダクレーン1であり、他のクレーンは、制御装置により制御されて動作するフォロワクレーン2である。制御装置は、フォロワクレーン2における搬送物3の振れ幅に基づいてフォロワクレーン2のリーダクレーン1に対する距離偏差を推定し、推定された距離偏差をなくすようにフォロワクレーン2ヘの動作指令を生成する。この動作指令によりフォロワクレーン2を動作させてリーダクレーン1の動作に追従させる。
(もっと読む)
1 - 10 / 16
[ Back to top ]