
国際特許分類[B66D1/48]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | キヤプスタン;ウインチ;タックル,例.プーリ・ブロック,ホイスト (784) | ロープ,ケーブル,またはチェーンの巻上装置;キヤプスタン (546) | 他の構造上の細部 (273) | 制御装置 (167) | 自動的なもの (30)
国際特許分類[B66D1/48]の下位に属する分類
ロープ,ケーブルまたはチェーンの設定された張力を維持するためのもの,例.引き船用のロープまたはケーブルにおいて,係留のためのチェーンにおいて;曳航または係留用ウインチケーブルの張力制御 (23)
ロープまたはケーブル緊張を変化するためのもの,例.水から船を引上げるとき (1)
国際特許分類[B66D1/48]に分類される特許
1 - 6 / 6
洋上荷役システム及びこれを備えた洋上浮遊体
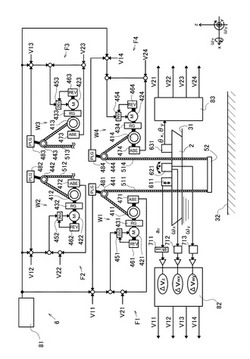
【課題】吊荷の上下動や揺動および定常的な傾きを抑制することが可能な洋上荷役システムを提供する。
【解決手段】同一の洋上浮遊体2に取付けられる複数のウィンチ等の荷役機構W1〜W4と、それらより引き出され吊荷52を協働して懸架するワイヤロープ511〜514と、それらの引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1〜W4を制御する制御手段6とを具備する洋上荷役システムであって、制御手段6が、洋上浮遊体2または吊荷52に設けられる揺動検出部621と、吊荷52の揺動を抑制するための各ワイヤロープ511〜514の引き出し量補正値V11〜V12を揺動検出部621からの検出値に基づいて出力する揺動補正指令部82とを備え、揺動補正指令部82からの出力値をフィードバックして荷役機構W1〜W4の制御を行うよう構成した。
(もっと読む)
洋上荷役システム及びこれを備えた洋上浮遊体

【課題】吊荷の水中高度を精度良く維持しつつ上下動を抑制することが可能な洋上荷役システムを提供する。
【解決手段】洋上浮遊体に取付けられるウィンチ等の荷役機構W1と、荷役機構W1より引き出され吊荷52を懸架するワイヤロープ511と、ワイヤロープ511の引き出し量を変化させ吊荷52を下降または上昇させるように荷役機構W1を制御する制御手段6とを具備するものであって、制御手段6が、吊荷52に設けられる海底31との距離を測る水中高度検出部651と、吊荷52の水中高度Hを制御するためのワイヤロープ511の引き出し量補正値を水中高度検出部651からの検出値に基づいて出力する高度補正指令部88とを備え、高度補正指令部88からの出力値をフィードバックして荷役機構W1の制御を行うように構成した。
(もっと読む)
インバータホイストの駆動制御装置及びインバータホイストの駆動制御方法
【課題】電源電圧が低下した場合や電動機の電圧特性により定格速度で出力電圧が飽和した場合でも、比較的簡易な処理で荷重の落下を回避し、安定したベクトル制御が可能なインバータホイストの駆動制御装置及びインバータホイストの駆動制御方法を提供する。
【解決手段】電源電圧低下などによる出力電圧飽和(過変調)を検出したとき、運転速度指令を、所要トルクを出力することができる周波数まで低減することで、誘導電動機2の運転速度を低減する。これにより、低速から高速までの全領域において、ホイストとしての機能を損ねることなく、安全でかつベクトル制御の持つ性能を十分に活用することが可能となる。
(もっと読む)
曳航ロープの長さ制御方法とその装置
【課題】 船体動揺によって生じるロープの繰り出し/巻き込みを補償する制御操作を抑えて安定したロープ長の制御が行える曳航ロープの長さ制御方法を提供すること。
【解決手段】 曳航体を曳航するロープ長目標値2と実ロープ長のフィードバック5の信号とに基いて前記ロープ長目標値2とのロープ長偏差7を得て、このロープ長偏差7に基いてロープ操作量4を出力するとともに、前記曳航体を曳航する船体の動揺周波数を同定し、この同定した動揺周波数の帯域を前記ロープ操作量4からノッチフィルタで低減させる。
(もっと読む)
電動トロリー付き電動チェーンブロックの駆動制御装置
【課題】昇降用電動機及び横行用電動機の単独・同時運転操作が簡単で、同時に昇降用電動機と横行用電動機を駆動でき、更に容量の小さい電磁開閉器を用いることで装置が小型化できる電動トロリー付き電動チェーンブロックの駆動制御装置を提供すること。
【解決手段】電動トロリー付き電動チェーンブロックの駆動制御装置において、横行用電動機19又は昇降用電動機20の駆動を操作ボックスの先行して操作されたスイッチによるものをインバータ12の駆動とし、次に操作されたスイッチ操作によるものを商用電源10の駆動とする制御手段を設けた。
(もっと読む)
移動体の転倒防止装置及び移動体を支える方法並びにプログラム
【課題】 ヒューマノイドロボットを演技させる際に、その転倒を防止する。
【解決手段】 ワイヤを繰り出したり引き込むためのワイヤ伸縮機構1乃至3を備え、これらはそれぞれ異なる位置に設けられる。さらに、複数の前記ワイヤ伸縮機構からの複数のワイヤに接続された交点部と、前記交点部に設けられてその下方を撮影する撮像部51と、一端が前記交点部に接続され、他端が前記交点部の下方に位置する移動体に接続された移動体吊り上げ用ワイヤと、複数の前記ワイヤ伸縮機構を制御する制御部100とを備える。前記撮像部で撮影した前記移動体の画像に基づき前記移動体と前記撮像部の相対位置関係を求め、求めた相対位置関係に基づき複数の前記ワイヤ伸縮機構を駆動して、前記交点部を前記移動体の動きに追従させる。
(もっと読む)
1 - 6 / 6
[ Back to top ]