
国際特許分類[B66F19/00]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | 他に分類されない巻上げ,もち上げ,牽引,または押進,例.荷物の表面に直接接してもち上げ,または押進をさせる装置 (3,073) | 他に分類されない巻上げ,もち上げ,牽引または押進 (113)
国際特許分類[B66F19/00]の下位に属する分類
国際特許分類[B66F19/00]に分類される特許
101 - 110 / 112
搬送手段の制御システム
【課題】 従来の搬送手段における制御システムでは、作業者が、良好な操作感覚で荷物を昇降させることができない上に、荷物の把持と操作レバーの操作とを同時に行って荷物を水平移動させることができない。
【解決手段】ロープ2の下部に掛かる力であって作業者による上下方向の操作力、荷物の質量および荷物の加速度による力の大きさを計測する力計測手段3と、力計測手段3の計測結果に基づき第1演算部がサーボモータの回転の方向および速度を演算してサーボモータに駆動指令の信号を出す第1制御手段4と、ロープ巻揚げドラムから巻き下げられたロープ2の長さを計測する長さ計測手段と、ロープ2によって吊り下げられた荷物の重量を計測する重量計測手段と、作業者が荷物を水平方向へ押した時のロープ2が垂直面とで成す振れ角の角度を計測する角度計測手段と、長さ計測手段、重量計測手段および角度計測手段からの計測情報に基づき第2演算手段7がクレーンの走行条件を演算してクレーンに駆動指令の信号を出す第2制御手段と、を具備したことを特徴とする。
(もっと読む)
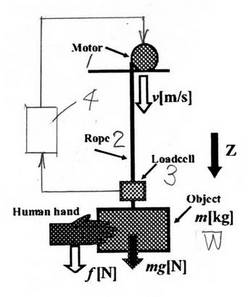
昇降装置の制御システム

【課題】荷物の昇降装置において、作業者は荷物の把持と操作とを同時に行うことができ、良好な操作感覚で望む方向へ望む速度で荷物を昇降させることができる。
【解決手段】サーボモータ1の正逆駆動によって巻上げ・巻下げされるロープ2により昇降されまたは位置が維持される荷物に作業者が操作力である力を加えて作業者の望む方向へ望む速度で当該荷物を昇降させるために前記サーボモータ1の駆動を制御するシステムにおいて、ロープ2の下部に掛かる力であって作業者の操作力、荷物の質量および荷物の加速度による力の大きさを計測する力計測手段3と、力計測手段3の計測結果に基づき演算部がサーボモータ1の回転の方向および速度を演算してサーボモータ1に駆動指令の信号を出す制御手段4とを具備した。
(もっと読む)
運搬方法及びその運搬装置
【課題】簡易的なアタッチメントで、スムーズに袋状の荷役物を運搬する運搬方法及びその運搬装置を提供する。
【解決手段】アタッチメント13の形状は横の棒状又はフック状であり、センサを配設したハンド部14を有し、該ハンド部を作業者の手15に装着し、荷役物16をアタッチメントに懸架させて、荷役物が重なった場所を作業者が把持する。
(もっと読む)
搬送装置および搬送方法
【課題】フロアパネルの敷設作業に際し、作業者にかかる負担を軽減して作業効率を向上するための搬送装置を提供する。
【解決手段】フロアパネル82を吸着する吸着部38と、吸着されたフロアパネル82を水平方向に回動するアーム部30と、このアーム部30を昇降する昇降機構を備えた支柱24と、この支柱24が取付けられた移動台車22とを備えた搬送装置において、前記移動台車22には、作業者が着座する台座部26と、前記アーム部30には、作業者が台座部26に着座した状態でフロアパネル82の吸着・解除を操作する操作パネルとを備える。
(もっと読む)
ロータ軸挿脱装置
【課題】 缶胴に対して傷付けることなくロータ軸を容易に出し入れでき、缶胴及びロータ軸の径が異なっても径の大きさに拘わることなく容易に出し入れできる。
【解決手段】 ロータ軸3にそれぞれ着脱可能に取り付けられた上下方向ガイド機構及び横方向ガイド機構10Bを備える。上下方向ガイド機構は、ロータ軸3に着脱可能に取り付けられた第1支持体11と、該第1支持体11の底部に取り付けられ、缶胴2の内壁2aの底部を走行ローラ25が走行する台車18とを有している。横方向ガイド機構10Bは、ロータ軸3の縮径部3bに着脱可能に取り付けられた第2支持体31と、第2支持体31に径方向に沿い張り出すアーム35と、該アーム35の先端部に径方向に移動可能に取り付けられ、回転自在とされた案内ローラ40とを有している。
(もっと読む)
印刷機ユニット用吊具装置、及び同吊具装置を備えた印刷ユニット又は輪転印刷機
【課題】 人が操作して、印刷機ユニットの版胴又はブランケット胴の外層部を構成する円筒形のスリーブを版胴又はブランケット胴に取り付け、又は取り外すための吊具装置において、重量の大きなカウンタウエイト等を排して、構造の簡素化及び重量の軽減を図り、装置の操作性と取り扱いを向上させる。
【解決手段】 印刷機ユニット11上に設置される支柱2と、同支柱に回動可能に設けられ、リンク機構を有する水平面内で揺動可能なアーム5と、同アームの先端に上下方向に摺動可能に取り付けられたガイド1と、同ガイドの下方部分に水平面内で旋回可能で、スリーブの内部に挿入されるスリーブホルダ8と、ボールスプライン1に負荷する荷重を検知する荷重センサ3と、荷重センサ3の荷重検出値を相殺する反力を前記荷重負荷位置に付加するバランス用エアシリンダ9とを備える。
(もっと読む)
重力補償装置
重力補償装置は、基本質量(10)によって回転軸線(13)から第1の距離を置いたところで平衡装置(12)に及ぼされた力を、回転軸線から第2の距離を置いたところで平衡装置に反力を及ぼす力発生装置、例えばばね(14)によって、部分的に又は全体的に補償する。第1の距離、第2の距離又はこれら両方は、所望の重力補償具合を提供するよう選択可能である。角度可変半径を有する1つ又は2つ以上の滑車を使用するのがよい。重力補償装置は、基本質量にそれほど質量を追加することはなく、設計が単純である。 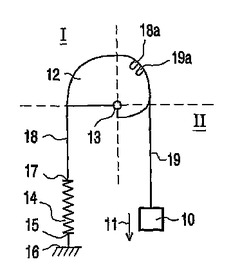 (もっと読む)
(もっと読む)
荷役物昇降装置
【課題】 荷役物を保持した懸吊状態では、荷役物保持手段に設けたコントロールスイッチを解放状態としても、荷役物の保持状態が解除されない。
【解決手段】 第1パイロット弁36のパイロットポート36a,36bと第1切換弁38とを連通する管路40の間に第2パイロット弁46を設ける。第2パイロット弁46には、基準パイロット圧と、バランサ16へ供給される流体圧の分岐圧力であるパイロット圧とを常時印加する。第2パイロット弁46へのパイロット圧が基準パイロット圧より小さい場合は、第1パイロット弁36へ流体圧を供給して保持手段22での荷役物32の保持および解除を可能とする。また第2パイロット弁46へのパイロット圧が基準パイロット圧より大きい場合は、第1パイロット弁36への流体圧の供給を停止し、保持手段22が荷役物32の保持を解除できないようにする。
(もっと読む)
エアバランス装置
【課題】小型で、製造し易く、操作が容易なエアバランス装置を得る。
【解決手段】被搬送体1を吊下げたシリンダ2への供給圧を、導入する制御圧に応じて被搬送体1の荷重に拮抗する圧力に調圧する主弁10を備える。また、シリンダ2に吊下げた支持部材46に梃子部材48を揺動可能に支持すると共に、梃子部材48に被搬送体1を吊下げた。梃子部材48にねじ軸54の回転により移動台56を移動する移動機構を設け、移動台56に被搬送体1を吊下げ位置調整可能に吊下げた。また、梃子部材48の揺動により開閉して制御圧を増減させる制御弁60を支持部材46に設け、かつ、制御圧の導入により梃子部材48を被搬送体1の荷重に抗する方向に揺動させる反力機構72を支持部材46に設けると共に、反力機構72による梃子部材48の揺動に抗する方向に梃子部材48を付勢する付勢部材84を設けた。
(もっと読む)
電動昇降装置
【課題】本発明は、部品点数を削減でき構造簡単であるとともにロック棒を容易に加工できる電動昇降装置を得ることにある。
【解決手段】本体部1に背圧ばね35で下方に付勢される本体部側接点台21を上下動可能に取付ける。昇降部2を上昇位置に保持するロック手段が、本体部に固定した1本のロック棒12と、昇降部に取付けられロックばねで付勢される一対のロック爪44とを備える。ロック棒を、大径部14の上側にロック爪が引掛けられる第1段差17を設けて中径部15を連ねると共に中径部の上側に第2段差18を設けて小径部16を連ねて形成する。接点台21の中央部に段差18より小径で小径部16が貫通するロック棒通孔28を設ける。通孔28に小径部を通してロック棒12を本体部1に下向きに固定して、通孔28の孔縁が段差18に上側から引っ掛ったときに接点台21を位置決めすることを特徴としている。
(もっと読む)
101 - 110 / 112
[ Back to top ]