
国際特許分類[B66F19/00]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | 他に分類されない巻上げ,もち上げ,牽引,または押進,例.荷物の表面に直接接してもち上げ,または押進をさせる装置 (3,073) | 他に分類されない巻上げ,もち上げ,牽引または押進 (113)
国際特許分類[B66F19/00]の下位に属する分類
国際特許分類[B66F19/00]に分類される特許
41 - 50 / 112
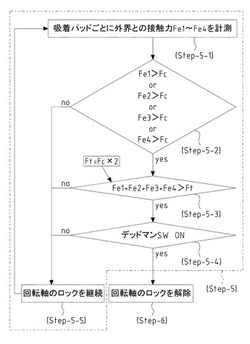
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置によるワークの搬送効率や、パワーアシスト装置を用いてワークを組み付ける場合の位置決め精度を改善するために、搬送途中におけるワークの姿勢を安定させるとともに、作業者による微妙な位置決めを可能とするパワーアシスト装置およびその制御方法を提供する。
【解決手段】接圧センサ3e・3e・・・により、ウィンドウ10に作用する押圧力Fe1〜Fe4を検知し、検知結果を制御装置5に入力する第一押圧力検知工程と、制御装置5により、検知した押圧力Fe1〜Fe4が、予め設定した第一閾値Fcを越えているか否かを判定する押圧力判定工程と、制御装置5により、デッドマンスイッチ6・6・・・が入状態であるか否かを判定するデッドマンスイッチ判定工程と、制御装置5により、第一押圧力検知工程と押圧力判定工程とデッドマンスイッチ判定工程の各結果からフリージョイント4の回転規制を解除するか否かを判定する。
(もっと読む)
荷役機械及びその制御方法

【課題】重量が未知である荷役物に対し無負荷バランス状態から負荷バランス状態への移行を短時間で且つ安定して行いうる荷役機械を提供する。
【解決手段】本発明の荷役機械は、クランプ機構8によって荷役物7を保持して昇降させるアーム4と、空気式シリンダ20と、エアー流量制御部23及び圧力比例制御部22とを有する。空気式シリンダ20の圧力を検出するエアー圧力センサ26と、クランプ機構8の動作加速度を検出する加速度センサ27と、エアー流量制御部23及び圧力比例制御部22の動作を制御する制御回路24とを備え、加速度センサ27にて得られた結果に基づき、エアー圧力センサ26によって空気式シリンダ20におけるエアーの圧力を検出する一方、エアー圧力センサ26にて得られた結果に基づき、圧力比例制御部22の空気式シリンダ20に対するエアーの圧力を負荷バランス圧として設定する。
(もっと読む)
荷役機械
【課題】低コストで飛び跳ね動作の検出精度が高く、さらに種々の荷役機械に柔軟に取り付け可能な飛び跳ね対策技術を提供する。
【解決手段】本発明の荷役機械1は、上下方向に移動自在に構成され荷役物7をクランプ機構8によって保持して昇降させるアーム4を有する昇降機構5と、エアー源22から供給されるエアーの圧力によって昇降機構5を駆動するシリンダ20とを有し、シリンダ20に対して給排気するエアーの流量及び圧力を操作ボックス9からの命令に基づき圧力比例制御弁21を用いて制御する荷役機械である。アーム4先端部の動作加速度を検出するMEMS技術による加速度センサ30が設けられ、加速度センサ30にて得られた結果に基づき、電子制御回路25から圧力比例制御弁21への命令によってシリンダ20に対するエアーの流量及び圧力を制御する。
(もっと読む)
ガススプリング式バランサ装置
【課題】大重量の長尺物体の高さ位置を1人で簡単に調節可能な高さ位置調節手段を備えたガススプリング式バランサ装置を提供すること。
【解決手段】吊持手段の吊持部で吊持される上側支持体12と上側支持体12の下方に所定間隔あけて平行に対置された下側支持体16であって、吊持対象の物体9が吊持される下側支持体16と、上側支持体12と下側支持体16の相互に離隔した複数部位に上端部と下端部が夫々連結された複数のバランサ20であって、上端部と下端部を接近させる方向へ付勢するガススプリング21を夫々有する複数のバランサ20と複数のバランサ20の中間の位置において上側支持体12と下側支持体16に連結されて、バランサ20の付勢力で物体9を吊持した状態で下側支持体16に少なくとも上方向きの力を作用させることで下側支持体16と物体9の高さ位置を少なくとも上方へ調節可能な高さ位置調節手段60とを備えた。
(もっと読む)
ガススプリング式バランサ
【課題】 ガススプリング式バランサにおいて、圧縮ガスの充填量を変更することなく最大付勢力を増減調節可能とし、バランサの汎用性を高めること。
【解決手段】 ガススプリング式バランサは、充填された圧縮ガスによりロッド部材14を本体ケース12から進出させる方向へ付勢するプッシュ型ガススプリング11と、ガススプリングのガス作動室13に連通されたシリンダ室52を有するシリンダ部材50と、シリンダ室52にその軸心方向へ可動に収容されシリンダ室52の圧縮ガスを受圧するピストン部材54と、ガス作動室13内の圧縮ガスのガス圧を調節する為に、ピストン部材54の軸心方向位置を無段階に変更可能なピストン位置調節機構55とを設けた。
(もっと読む)
直線運動装置
【課題】円滑に昇降リンクを鉛直方向に移動させ、正確な直線運動を確保する。
【解決手段】支持基台に対して上部を水平移動可能に支持するスライドリンク20と、これに対して平行に配置し上部を固定するサポートリンク30と、スライドリンクの支持部に一端部を回動可能に支持する第1の揺動リンク40と、これに対して平行に配置し、スライドリンクの支持部に中間部を回動可能に支持する第2の揺動リンク50を備え、昇降リンク60に第1及び第2の揺動リンクの他端部を回動可能に支持すると共に、サポートリンクの支持部に対し第1の揺動リンクの中間部を上下及び水平方向に移動可能に支持する。而して、第2の揺動リンクの一端部51を上下方向に駆動すると、第1及び第2の揺動リンクが揺動し、これに連動して第1の揺動リンクがサポートリンクに対し上下及び水平方向に移動すると共にスライドリンクが水平移動しつつ、昇降リンクが上下に直線運動する。
(もっと読む)
ワーク移送用バランサ装置
【課題】高精度にワークを静止させることができるワーク移送用バランサ装置を提供する。
【解決手段】平衡アーム部材4と回動アーム部材5とが連結する回動連結部8に、回動アーム部材5の回動に従って複動シリンダ装置17の内圧を変更するエアー調圧器20を配設した。このエアー調圧器20は、所定圧の一次圧が印加される一次圧用ポート61と、回動アーム部材5の回動角度αの変化に対応して増減される二次圧を出力する二次圧用ポート62とを具備し、さらに該二次圧用ポート62は複動シリンダ装置17のヘッド側室19に連通されて二次圧が複動シリンダ装置17内に印加されるようにした。そして、回動アーム部材5が回動してワーク側のモーメントが変化すると、二次圧が調圧されて複動シリンダ装置17のピストンロッド18が進退制御され、左右のモーメントが一致する構成とした。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】ロボットの手先もしくはワークの進入できない領域である仮想ガイドを設けて、ロボットの手先速度を決定することでワークの位置と姿勢を制御できるパワーアシスト装置を提供する。
【解決手段】複数の関節3aを有するロボットアーム3と、前記ロボットアーム3にフリージョイント4を介して3次元的に揺動可能に接続され、ウィンドウ2を保持する吸着治具5と、関節3a及びフリージョイント4の角度を検出するエンコーダ10と、前記角度に基づいて前記ロボットアーム3の手先3c位置またはウィンドウ2の位置を計算する第一演算部8aと、前記ウィンドウ2の進入を認めない領域である仮想ガイドGを記憶した記憶部8cと、手先3c位置もしくはウィンドウ2の位置を、仮想ガイドGの位置と比較して、仮想ガイドGを越えないように制限をかける速度指令値を算出する第二演算部8bと、前記速度指令値で手先3cを制御する制御手段8と、を備えた。
(もっと読む)
パワーアシスト装置およびその制御方法
【課題】パワーアシスト装置に対する作業負荷を軽減しつつ、ワーク組み付け作業の作業性の向上を果たすパワーアシスト装置の制御方法を提供する。
【解決手段】パワーアシスト装置1の制御方法であって、ウィンドウ10の基準位置10a乃至10dが取付対象物たる本体11の嵌め込み基準位置11a乃至11dに合致したことを検知する位置決め完了検知工程と、位置決め完了検知工程が完了したときのウィンドウ10の基準位置10a乃至10dと本体11の嵌め込み基準位置11a乃至11dの合致位置を検知する基準位置検知工程と、合致位置に基づいて仮想回転軸を生成し、ウィンドウ10が仮想回転軸を中心としてパワーアシスト装置1により自律的に回転される自律回転工程から成る。
(もっと読む)
パワーアシスト装置及びその制御方法
【課題】作業者の操作に対する応答性に優れ、対象物の移動や取り付け作業の効率を向上させたパワーアシスト装置及びその制御方法を提供することを目的とする。
【解決手段】作業者の操作に協動して対象物2を移動可能なパワーアシスト装置1であって、対象物2を把持するハンド部10と、ハンド部10を上下方向に駆動させる上下駆動部11と、上下駆動部11に対してハンド部10を任意の三次元方向に揺動自在に連結させるフリージョイント部12と、ハンド部10に対して所定の方向に粘性抵抗を付与するシリンダ装置13・14と、ハンド部10を操作する作業者の操作力を検出する力センサ15と、力センサ15により検出された操作力から上下駆動部11に対するインピーダンス制御指令値を算出し、インピーダンス制御指令値に基づいて上下駆動部11を駆動させる制御部16とを具備してなる。
(もっと読む)
41 - 50 / 112
[ Back to top ]