
国際特許分類[B66F19/00]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | 他に分類されない巻上げ,もち上げ,牽引,または押進,例.荷物の表面に直接接してもち上げ,または押進をさせる装置 (3,073) | 他に分類されない巻上げ,もち上げ,牽引または押進 (113)
国際特許分類[B66F19/00]の下位に属する分類
国際特許分類[B66F19/00]に分類される特許
61 - 70 / 112
吊り上げ装置
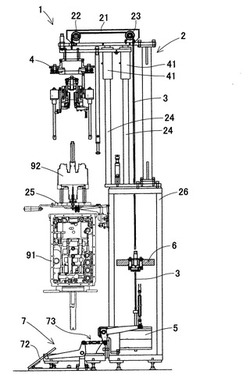
【課題】一定の高さでバランスウエイトの作用が自動的に入り切りされ、また簡単な操作で作用する高さ範囲が切り替わり、作業者の負担を軽減できて、組付作業の用途に適した吊り上げ装置を提供する。
【解決手段】、架台(本体架台2)と、中間部が該架台2に移動自由に支持されて両端部が互い違いに昇降する牽索部材(チェーン3)と、該牽索部材3の一端に設けられて荷物(アセンブル部品92)を吊る吊り部材(組付治具4)と、該牽索部材3の他端に常時吊り下げられて前記吊り部材4の荷重に拮抗する基礎ウェイト5と、該基礎ウェイト5の上側に配置されて前記荷物92の荷重に拮抗する追加ウェイト6と、該追加ウェイト6の昇降経路の所定高さの着脱位置で該追加ウェイト6を保持しまた保持を解除するウェイト切替え機構(ウェイトアンチバック機構7)と、を備える。
(もっと読む)
治具昇降装置

【課題】オペレータの手作業で治具を昇降するに際して、治具を緩やかに昇降する。
【解決手段】治具昇降装置10では、オペレータによって操作レバー52が回転操作されると、それに伴って回転体50がカムフォロア54と共に上下軸を中心として回転する。このとき、カムフォロア54が回転開始位置から回転終了位置に至るまでの間にカム57によって下降するように案内されるのに伴って、回転体50も下降する。また、治具30は、この回転体50に連動して下降し、ワーク支持台25に支持されたワークの上方に離間していた位置から該ワークに接触して下方向へ押圧する位置に至る。このように、回転体50の回転運動が治具30の上下運動に変換されるため、治具30を直に上下動させる場合に比べて緩やかに上下動させることができる。また、治具30がワークに接触したあと下方向へ押圧するときの押圧力も大きくすることができる。
(もっと読む)
抜柱装置
【課題】 手動式の牽引機を用いることなく、しかも、搬入作業に係る労力も低減できて、抜柱作業を効率よく短時間に行えるようにする。
【解決手段】 本発明に係る抜柱装置は、地面に立設された柱1の下部に周面に沿って紐状体2を捲回すると共に、該柱1の周囲の地面に油圧シリンダ3を配置し、捲回された状態の紐状体2を締め付け、油圧シリンダ3を、作業現場に搬入される作業車10に搭載されている油圧ユニット11によって駆動する。
(もっと読む)
建設現場や、鉱山で使用する、片腕で扱える重量が1トン以上の5本指強力ロボットアーム。
【課題】重量を物取り扱う作業現場での、5本指を持つ人間の腕型ロボットを提供する。
【解決手段】以上の課題を解決するために、マスタースレーブ方式で制御する5本指強力ロボットアームを発明した。本発明を作業内容に適した任意の台座、又は台車に装着して活用する。この形態なら二足歩行時の重心が高くならないように、5本指強力ロボットアームを軽量化する必要性は高くない。5本指強力ロボットアームはアクティブサスペンション(脚)の技術をアーム部に使用したアクティブアクチュエーター(腕)を主たる動力源とする。アクティブサスペンションは、重さが50トン以上ある最新式の戦車の姿勢制御でも使用され始めており、十分な高出力と、耐久性がある。
(もっと読む)
支柱型高所設置物昇降装置
【課題】高所設置物を昇降する際、モーターを用いない簡単な構成で、支柱横断面サイズを比較的小さくするとともに、容易に昇降できるようにし、しかも安価で長寿命の構成とする。
【解決手段】カウンターウエイト13の上端部では、角鋼管で形成された本体部130の側面に4本のアクリル樹脂製回転阻止バー151、152、153及び154が交差して、その内側が正方形を描くように組まれ、それぞれが本体部の各側面に螺着されて、回転阻止部を構成している。カウンターウエイト13はさらに、本体部の、開口部131側の側面に、角形鋼管の把手16を有し、それが該側面に、上端部、下端部及び中間部の3箇所において、短い角形鋼材のスペーサ160を介し溶着されている。カウンターウエイト13の側面の上端部及び下端部にはそれぞれピン171及び172が立設され、それらにラッチ機構173及び174の回動部が軸支されている。
(もっと読む)
昇降装置の制御システム
【課題】 荷物の把持と操作とを同時に行なって、良好な操作感覚で荷物を昇降させる。
【解決手段】サーボモータ1の正逆回転駆動によって巻上げ・巻下げされるロープ2により昇降されまたは位置が維持される荷物に、作業者が操作力を加え、望む方向へ望む速度で荷物を昇降させるためにサーボモータの回転駆動を制御するシステムでおいて、ロープの下部に掛かる力であって作業者の操作力、荷物の質量および荷物の加速度による力の大きさを計測する力計測手段3と、力計測手段の計測結果に基づき演算部がサーボモータの回転の方向および速度を演算してサーボモータに駆動指令の信号を出す第1制御手段と、荷物が着地する際にサーボモータの正逆回転駆動のための入出力が安定となる安定条件を、安定性理論により求める第2制御手段と、力計測手段の計測値が閾値を下回った瞬間に第1制御手段から第2制御手段に切り替える切換え手段を具備しる。
(もっと読む)
ローダ用レール装置
【課題】 床面の平坦化を簡易にする。
【解決手段】 いずれも溝形に形成されているレール外枠2及びレール本体3を備え、レール外枠2は上側を開口状態にして床7内に取り付けられ、レール本体3はその内部が上下方向に昇降できるローダ100の収納空間3dであり、内面に補強レール部5を設けてあって、補強レール部のレール本体部5a上をその長さ方向に沿ってローダ100が走行可能であり、レール本体3はレール外枠内に収納されており、このレール外枠の開口部2aから外側に離脱可能であり、レール本体の底部3cが開口部端の位置でこの開口部を被覆可能である。
(もっと読む)
重量物搬送装置
【課題】 重量物に作用する走行体を移動するのに要する力が小さくて済む重量物搬送装置を提供する。
【解決手段】 重量物搬送装置45は第1フレーム体46と第2フレーム体47とからなる長手方向に伸びるフレーム体と、フレーム体の上に長手方向に移動自在となるように設置され、重量物を搬入又は搬出するための走行体18と、走行体18に取り付けられた第1動滑車20及び第2動滑車21と、回転ドラム34から伸びて第2定滑車31、第1動滑車20及び第1定滑車30に係合する第1ワイヤ部分27と、回転ドラム34から伸び、第2動滑車21及び第3定滑車32に係合する第2ワイヤ部分28とから構成されている。第1動滑車20又は第2動滑車21の働きによって、走行体18はいずれの方向にも移動でき、その移動に要する力が2分の1に軽減される。
(もっと読む)
ワーク保持装置
【課題】 カウンタウェイトの可動エリアを広くすることなく、ワークとカウンタウェイトとの重量バランスをとることができるワーク保持装置を提供する。
【解決手段】 ワーク保持装置1は支持体3を備え、支持体3には昇降体8が上下動自在に支持され、昇降体8には、ワーク2を保持するワーク保持部13が支持されている。支持体3には、回動体18が支持体3に対して傾斜して回動自在に支持されている。回動体18上には、ワーク保持部13に保持されたワーク2の重量に対して重量バランスをとるためのカウンタウェイト23が載置されている。昇降体8とカウンタウェイト23とは、スプロケット17に巻き掛けられたチェーン25により連結されている。ワーク保持装置1は、重量バランス調整用シリンダ22により支持体3に対する回動体18の傾斜角度を変えることで、ワーク2とカウンタウェイト23との重量バランスを調整する。
(もっと読む)
ワーク移動装置
【課題】 複雑な制御系を用いずに、重量バランスの自動調整を行うことができるワーク移動装置を提供する。
【解決手段】 ワーク移動装置1は支持体3を備え、支持体3には昇降体8が上下動自在に支持され、昇降体8には、ワーク2を保持するワーク保持部13が支持されている。支持体3には回動体18が回動自在に支持され、回動体18上には、ワーク2の重量に対して重量バランスをとるためのカウンタウェイト23が載置されている。また、ワーク移動装置1は、昇降体8の動き出しを検知するセンサと、昇降レバー15により昇降体8の上下動が指示されると、その指示に応じた方向への昇降体8の動き出しが検知されるまで、ワーク2の重量とカウンタウェイト23の重量とが釣り合う方向に回動体18を回動させるように重量バランス調整用シリンダ22を制御するコントローラとを備えている。
(もっと読む)
61 - 70 / 112
[ Back to top ]