
国際特許分類[B66F19/00]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | 他に分類されない巻上げ,もち上げ,牽引,または押進,例.荷物の表面に直接接してもち上げ,または押進をさせる装置 (3,073) | 他に分類されない巻上げ,もち上げ,牽引または押進 (113)
国際特許分類[B66F19/00]の下位に属する分類
国際特許分類[B66F19/00]に分類される特許
81 - 90 / 112
パワーアシスト装置とその適応モデル予測制御方法
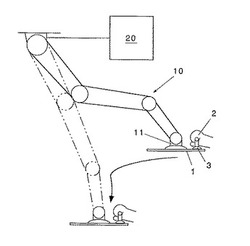
【課題】 人とロボットの協調作業において、できるだけ小さい操作力で、できるだけ目標の最終位置からのずれを小さく抑えることができるパワーアシスト装置とその適応モデル予測制御方法を提供する。
【解決手段】 運搬対象物1をリジットに把持する手先部11をもった多関節アーム型ロボット10と、ロボットを制御する制御装置20とを備える。ロボット10は、多関節の関節角度ベクトルq、手先部位置x、及びロボットと協調作業する作業者が運搬対象物に加える力feを検出するセンサを有する。制御装置20は、センサで検出された関節角度ベクトルq、手先部位置x、及び作業者の力feに基づいて、作業者の手先粘性係数De、その弾性係数Ke、及び作業者の手先自然長位置xeをリアルタイムに推定する。この推定値に基づき、可能な限り小さい操作力で、位置決め誤差を可能な限り小さく抑えるように、ロボット10にアシスト力を発生させる。
(もっと読む)
昇降機構および搬送装置

【課題】重量物の昇降に適用される昇降機構であって、各構成部品を小さくしコンパクト化することができる昇降機構を提供すること。
【解決手段】重量物である搬送ユニット501を昇降する昇降機構502は、搬送ユニット501を支持して昇降させる昇降台550と、昇降台550を昇降させる昇降駆動部560と、昇降駆動部560に及ぼされる前記搬送ユニットの負荷に抗して上向きに作用するアシスト力を及ぼすアシスト機構570とを具備する。
(もっと読む)
荷役機械及びその制御方法
【課題】保持する荷役物の重量に関係なく、昇降機構を所望の速度で上昇及び下降動作させることができる荷役機械を提供する。
【解決手段】本発明の荷役機械は、上下方向に移動自在に構成され所定の荷役物Qを保持して昇降させる昇降機構5と、昇降機構5をエアーの圧力によって駆動する空気圧シリンダ20と、エアー源21から供給されるエアーの圧力を所定の圧力に調整して出力する圧力比例制御弁22と、圧力比例制御弁22から出力されるエアーの流量を所定の値に低下させて空気圧シリンダ20に供給する流量制御弁25とを有する。圧力比例制御弁21から出力されるエアーの圧力を、空気圧シリンダ20におけるエアーの圧力に基づいて所定の値に制御するとともに、その出力されるエアーの流量を低下させて亜音速領域の流量のエアーを空気圧シリンダ20に供給する。
(もっと読む)
吊り上げ装置及び作業台車
【課題】ワークをふらつかせずに安定して吊り上げることができ、ワークの荷重にあわせてバランスさせる荷重を調整することが容易で、簡素な構成でかつ低廉な吊り上げ装置を提供する。
【解決手段】本発明の吊り上げ装置1は、基台2に保持される梁3(連結アーム25により回動自在に保持)と、該梁3の下側に一端を保持され前記梁3に対し上下方向に回動可能な腕部材4と、該腕部材4の他端に保持されてワークWを吊る吊り上げ手段5と、前記梁3に配設されたぜんまいばね61と、前記腕部材4に配設された動滑車71と、該動滑車71に架け回されて一端が前記梁3に固定されかつ他端が前記ぜんまいばね61に連結される牽索ワイヤ69と、からなり、前記梁3と前記腕部材4との間で前記ワークWとは逆方向への荷重が作用することを特徴とする。前記ぜんまいばね61の巻き上げ及び緩めを行う駆動モータ81及びスイッチ85、を備えるようにしてもよい。
(もっと読む)
昇降装置
【課題】コンパクトで、かつ長寿命とし得るバランス機構を備えた昇降装置を提供する。
【解決手段】この昇降装置10は、下段ポール1に対してスライド移動可能な伸縮手段取付ブラケット5に、カメラ3を載置固定可能な上段ポール2が連結されている。下段ポール1の下部には下側支軸8設けられ、この下側支軸8に対して平行かつ水平方向に所定距離Aだけ離れて伸縮手段取付ブラケット5に上側支軸7が設けられており、ガススプリング6が下側支軸8および上側支軸7でその両端が繋がれている。そして、前記所定距離Aは、伸縮手段取付ブラケット5、上段ポール2およびカメラ3全体に昇降方向で作用する重力に対し、ガススプリング6の伸び量Sの最小値から最大値間での鉛直方向分力F′の最小値および最大値がいずれも釣り合う距離に設定されている。
(もっと読む)
バランサ装置とバランサ装置による配管系部品の交換方法
【課題】CVD装置などの膜付装置において、その配管系部品の組込み・交換作業を行うにあたり、クリーンルーム内での使用が可能で、作業員の労働負荷を極力軽減できるような補助作業用のバランサ装置を提供すること。
【解決手段】軸受け台9に支承され、垂直方向に作動するピストンロッド5とシリンダ4とからなるバランサを内蔵したユニバーサルアーム2を有し、前記ピストンロッド5の先端部に部品支え部材6を設けた配管系部品交換作業の補助作業用バランサ装置であって、該バランサ装置のピストンロッド5の先端部に設けられた部品支え部材6にて交換部品を支えながら該交換部品12と配管系との接続を解除して該交換部品12を取り外した後、その取り外した位置に新たな交換部品を該バランサ装置の部品支え部材6にて支えながら装着することができる。
(もっと読む)
シリンダ圧調整ユニット
【課題】 簡易な構成で達成され、駆動用シリンダへ駆動初期に必要とされる初期圧力を供給できると共に、駆動用シリンダが駆動している間、駆動用シリンダに常時変化する必要な流体圧を供給することのできるシリンダ圧調整ユニットを提供する。
【解決手段】 本シリンダ圧調整ユニットは、駆動用エアシリンダに、初期圧設定用シリンダ43の駆動により必要とされる初期圧力をレギュレータ29を介して供給することができると共に、駆動用エアシリンダからのシリンダロッドの進退運動に伴って、ラック34を進退運動させると共に平歯車35を回転させて、平歯車35の回転によりプッシュロッド58を進退運動させることにより、コイルバネ31の伸縮量を変位させて、レギュレータ29の駆動用エアシリンダへの設定圧力を常時切替えることが可能となる。
(もっと読む)
ウインチ制御装置
【課題】ウインチ制御装置において、吊荷の重量変化の要因を適正に判断することで吊荷
の昇降作業を円滑に行って作業性の向上を図る。
【解決手段】吊荷の重量の変動量に応じて巻取ドラム21を正逆回転させることで吊荷を
昇降させるバランサモードと、吊荷の重量の変動回数に応じて巻取ドラム21を正逆回転
させることで吊荷を昇降させるサインモードとを有し、制御装置27は、吊荷の重量の変
動量及び変動回数に応じてバランサモードまたはサインモードを選択切替する。
(もっと読む)
ワーク搬送装置及び方法
【課題】 把持ハンドの交換が容易に行われるワーク搬送装置及び方法を提供する。
【解決手段】 コクピットモジュール(ワーク)2を把持する把持ハンドと、この把持ハンドを作業者によって搬送できるように支持する助力装置50とを備え、把持ハンドを介してコクピットモジュール2を搬送するワーク搬送装置において、異なるコクピットモジュール2を把持する第一、第二把持ハンド4,5と、この第一、第二把持ハンド4,5にそれぞれ予め接続される第一、第二配線・配管71,72と、助力装置50に対して第一、第二把持ハンド4,5を着脱可能に連結するハンド切り替え装置60とを備え、作業者が第一、第二把持ハンド4,5からコクピットモジュール2にいずれかを選択して搭載助力装置50にハンド切り替え装置60を介して連結し、第一、第二把持ハンド4,5の一方を介してコクピットモジュール2を搬送する。
(もっと読む)
応力補償を有する部品の荷役装置、および同装置を含む巻き上げシステム
【課題】本発明は、伸長不可能部分(3a、3b)、ならびに、負荷時、部品(1)に対する負荷の限定された所定の変化に応答する部品(1)の荷役装置に関するものである。
【解決手段】荷役ワイヤーロープ(3)の限定された所定幅の弾性伸縮を可能にするばね手段(10、10´)を具備する部分(3c)とを備えた荷役ワイヤーロープ(3)を含むことを特徴とする部品(1)の荷役装置に関する。
(もっと読む)
81 - 90 / 112
[ Back to top ]