
国際特許分類[B66F9/06]の内容
処理操作;運輸 (1,245,546) | 巻上装置;揚重装置;牽引装置 (23,365) | 他に分類されない巻上げ,もち上げ,牽引,または押進,例.荷物の表面に直接接してもち上げ,または押進をさせる装置 (3,073) | 荷積みまたは荷おろしの目的のために,かさばったまたは重い物を昇降するための装置 (1,981) | 荷積みをした状態で,車輪またはそれに類似するものにより移動可能なもの,例.フォークリフト (1,977)
国際特許分類[B66F9/06]の下位に属する分類
マストをもたないもの (41)
床から屋根へ荷積みする装置,例.スタッカクレーン (174)
構造上の特徴および細部 (1,519)
国際特許分類[B66F9/06]に分類される特許
1 - 10 / 243
架空配管の撤去工法および撤去作業用ゴンドラ
【課題】架空のガーター上に設置された架空配管の撤去工法において、高所足場を仮設するための費用を縮減することができ、且つ高所足場の仮設に伴う危険を回避するための負担を軽減することができる架空配管の撤去工法およびその撤去工法において用いられる撤去作業用ゴンドラを提供する。
【解決手段】架空のガーター上に設置された架空配管の撤去工法において、揚重機によって揚重された吊り梁に吊り下げ固定された少なくとも2台の有人式バケット型ゴンドラを利用して、前記架空配管を撤去する撤去工程を含むことを特徴とするものである。
(もっと読む)
搬送装置の油圧制御装置

【課題】車両の車輪を持ち上げて搬送する搬送装置を作動させ、かつ左右のアクチュエータ(昇降用、前方旋回用、及び後方旋回用)の速度と位置を正確に同期させることができる搬送装置の油圧制御装置を提供する。
【解決手段】各アクチュエータ27,28a,28bが、それぞれの作動位置を検出する変位計29a,29b,29cを有する。油圧制御装置30は、上位制御装置32と左右の油圧制御ユニット34A,34Bとからなる。各油圧制御ユニット34A,34Bは、上位制御装置32に接続された下位制御装置35を有する。上位制御装置32は、下位制御装置35に各アクチュエータ27,28a,28bに対する同一の変位指令値A,B,Cを逐次出力し、各下位制御装置35は、各アクチュエータ27,28a,28bの変位計の検出値a,b,cをフィードバック制御し、各アクチュエータの作動位置を変位指令値A,B,Cに一致させる。
(もっと読む)
産業車両
【課題】運転者が車両を操作する際に、後部車体構成部の外郭形状を容易に把握できるとともに、走行する通路に対する車両位置を容易に把握できる産業車両を提供する。
【解決手段】荷役具側の前進方向又は前記後部車体構成部側の後進方向に走行する産業車両であって、前記後部車体構成部の外縁における前記運転席の運転者Pから視認可能な位置、カバー21の外縁24に、前記後部車体構成部の外郭形状を把握可能とするとともに車両が走行する通路に対する車両位置から把握可能とする複数の目印31〜39が設けられている。
(もっと読む)
高所作業車のバスケット
【課題】正面及び側面のいずれの側からも乗降でき、また、扉の開閉に要する周囲スペースが可及的に縮小されたバスケットを提供する。
【解決手段】右側の乗降口6は、バスケット3の前面31の右側領域から右側面32にかけて設けられる。この乗降口6を開閉する扉7は、台座9に固定された支柱状の支持部材11に開閉機構8を介して開閉移動自在に支持される。開閉機構8は平行リンク機構で構成され、上部リンク部材8aと、下部リンク部材8bと、上部リンク部材8aを支持部材11と扉7に回動自在に連結する上部リンク節8cと、下部リンク部材8bを支持部材11と扉7に回動自在に連結する下部リンク節8dとを備えている。上部リンク節8cと下部リンク節8dとは、台座9と平行な方向に相互にオフセットされており、これにより、開閉時における扉7の回動動作が阻止される。
(もっと読む)
高所作業車
【課題】作業者が作業台へ乗降するときに車体上から転落するのを防止した高所作業車を提供する。
【解決手段】走行可能な車体2と、車体2上に旋回自在に設けられた旋回台4と、基端部が旋回台4に枢結されて起伏自在に設けられたブーム5と、ブーム5の先端部に設けられた作業台9とを備え、ブーム5が車体2上に倒伏された状態で格納されるように構成された高所作業車1において、ブーム5が車体2上に格納された状態で、作業者OPの作業台9への乗降経路RTがブーム5に沿った車体2上に設けられ、乗降経路RTに沿ってブーム5の基端部から先端部まで延びるガイドレール40がブーム5に取り付けられるとともに、作業者OPが作業台9へ乗降するときに車体2上から転落するのを防止する転落防止具(安全帯)90の先端の係止部93を係脱可能に係止させる安全器81が、ガイドレール40にスライド移動自在に取り付け可能となっている。
(もっと読む)
重量ランク判定機能付搬送装置
【課題】選別対象物の重量ランクを判定することができ,かつ、選別対象物を移動又は運搬する運搬装置としても使用可能な重量ランク判定機能付搬送装置を提供する。
【解決手段】リフト部2と、このリフト部2に設けられる計量部3と、リフト部2の上下動及び進行方向を操作する操作部4と、リフト部2の走行を可能にする走行部6と、重量ランク判定基準データ13を格納するメモリ部7と、複数の選別対象物18を収容器17に収容したままリフト部2で持ち上げた状態から,収容器17内の選別対象物18を1つ取り出した際の計量部3における計測値の変化量,及び,メモリ部7に格納される重量ランク判定基準データ13に基づいて,収容器17から取り出された1つの選別対象物18の重量ランクを判定する演算処理部8と、この演算処理部において得られた重量ランク判定結果を表示する表示部9とを有する重量ランク判定機能付搬送装置1による。
(もっと読む)
作業車両
【課題】走行用バッテリよりも出力電圧の高い作業用バッテリを走行用バッテリの充電に用いられる発電機によって充電可能な作業車両を提供する。
【解決手段】作業用バッテリ33の電力による高所作業装置20の駆動時には、第1リレースイッチ34によって第1バッテリ33aと第2バッテリ33bとの間の通電を制限することなく第2リレースイッチ35および第3リレースイッチ36によって走行用バッテリ32と第1バッテリ33aおよび第2バッテリ33bとの間の通電を制限している。また、作業用バッテリ33の充電時には、第2リレースイッチ35および第3リレースイッチ36によって走行用バッテリ32と第1バッテリ33aおよび第2バッテリ33bとの間の通電を制限することなく第1リレースイッチ34によって第1バッテリ33aと第2バッテリ33bとの間の通電を制限している。
(もっと読む)
ハンド走行リフター
【課題】ハンドルに設けた歪量に応じたモータの駆動を行うハンド走行リフターにおいて、後輪が浮き上がった際に、その浮き上がりを押さえ込むべくハンドルを押さえ込むと、ロードセルに歪が生じ、これにより前輪が駆動されると危険であるという問題がある。
【解決手段】後輪6が非接地状態になったこと、又は、非接地状態と同様の状態になったことを検知する非接地検知手段10を設け、この非接地検知手段10が作動した際は、ハンドル7操作による前輪4L駆動操作を無効化させるよう制御してなるハンド走行リフターの構成とする。
(もっと読む)
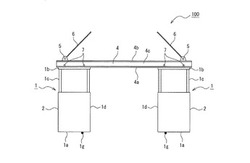
搬送装置、作業システム、および搬送方法
【課題】階段等の昇降設備の使用が困難な場合であっても、作業機械を上階フロアへ確実かつ短時間に投入可能とする搬送装置、作業システムおよび搬送方法を提供する。
【解決手段】本発明の一実施形態は、建物2内で作業する作業ロボット11と、作業ロボット11を遠隔で制御する制御装置12と、建物2の上階への吹抜においてフロア3と上階フロア4との間を昇降し、かつ搭載された搭載物を平行移動させる移動装置を有する架台43と、架台43上で移動装置により平行移動されて上階フロア4または上階フロア4の構造物6に接触することにより固定される固定部15bと、作業ロボット11の通路を形成する通路部15aとを有する渡板15とを備えた。
(もっと読む)
高所作業車
【課題】作業範囲を拡大させた高所作業車を提供する。
【解決手段】車体上に少なくとも起伏動自在に設けられたブーム10と、ブーム10の先
端部に上下に揺動自在に連結された中間リンク部材20と、中間リンク部材20の先端部
に上下に揺動自在に連結されたジブ30と、ジブ30の先端部に配設された作業台50と
、中間リンク部材20をブーム10に対して揺動させる第1油圧シリンダ21と、ジブ3
0を中間リンク部材20に対して揺動させる第2油圧シリンダ26とを備えて高所作業車
が構成され、第1油圧シリンダ21および第2油圧シリンダ26は、中間リンク部材20
の左右方向に互いに並列で、中間リンク部材20の側方から見て互いに交差するように、
中間リンク部材20の底面側にそれぞれ配設されている。
(もっと読む)
1 - 10 / 243
[ Back to top ]