
国際特許分類[E21B47/09]の内容
固定構造物 (153,614) | 地中もしくは岩石の削孔;採鉱 (8,211) | 地中もしくは岩石の削孔;探掘井からの石油,ガス,水,溶解性または溶融性物質または鉱物の懸濁液の採取 (2,475) | 坑井または井戸の調査 (114) | 坑井または井戸内の物体の位置の選定または決定;パイプの自由なまたは閉塞された部分の識別 (5)
国際特許分類[E21B47/09]に分類される特許
1 - 5 / 5
杭埋設工法で用いる支持層到達推定方法および支持層到達推定支援装置
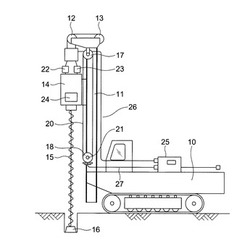
【課題】標準貫入試験で得られたN値のデータと、油圧駆動のオーガの仕事量の測定データとを対照させることにより、支持層への到達を正確に判定できるようにする。
【解決手段】オーガ装置により地盤を掘削する前に、掘削地点付近で標準貫入試験を実施し、一定の深度区間ごとにN値を測定し、オーガ装置により地盤を掘削しながら、オーガ装置の駆動軸の回転数と圧油の圧力および掘削深度を計測し、回転数と圧油の圧力値と掘削速度とから前記オーガ装置の行った仕事[J]を一定の掘削区間ごとに算出し、標準貫入試験により得られたN値のデータとオーガ装置の行った仕事[J]を、同じ深度のスケールで同一画面のグラフ上にプロットし、N値の変化と仕事[J]の変化を比較対照することにより、掘削深度が支持層に到達したかどうかを推定する。
(もっと読む)
一体形コア採取システム
ボーリング孔の周りの地下地層をコア採取するシステムであって、コア採取されるべき地層の近くでボーリング孔内に位置決め可能であってモータを含むツール本体と、モータに連結された回転駆動ヘッドと、一端が回転駆動ヘッドに連結されると共に他端がドリルビットを支持した回転ツールと、ボーリング孔内に固定可能に動作可能なアンカー及びツール本体及び回転ツールを前進させる軸方向駆動装置を含む駆動機構体と、回転ツールをボーリング孔から周囲地層中に側方に押し込むガイドとを有し、回転ツールは、環状ドリルビットを運ぶ管状コア採取ツールである、コア採取システム。 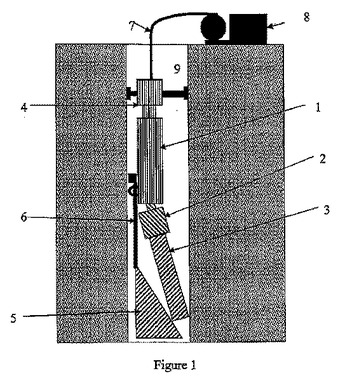 (もっと読む)
(もっと読む)
孔路計測方法

【課題】掘削孔の孔位置を精度良く測定する方法を提供する。
【解決手段】プローブ2を掘削孔1の最深部まで押し込んだ後、ケーブルを用いてプローブ2を引き抜きながらプローブ2のセンサーデータ及びケーブル速度データを貯える。前記掘削孔2の入り口まで引き抜いた時点で、前記センサデータの貯えを終了し、貯えた前記センサデータを時間軸を逆方向に演算して姿勢・方位角及び位置を算出する。
(もっと読む)
物体の位置の測定方法
パイプライン内の2つの物体の相互距離を測定するための方法である。方法は、パイプラインの材料および/またはパイプラインの外に存在する媒体の音響インピーダンスとは異なる音響インピーダンスを有する媒体で満たされたパイプラインを設けるステップと、2つの物体のそれぞれにクロックを設けるステップと、クロックの時間を同期させるステップと、2つの物体のうち第1の物体から第2の物体へ音波信号を周期的に送信するステップと、音波信号の受信時刻を測定するステップと、第1の物体から第2の物体までの遅延時間を決定するステップと、2つの物体間での信号の移動距離を、媒体における音波信号の伝播速度および音波信号の測定された遅延時間に基づいて計算するステップと、を備える。 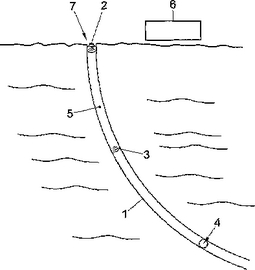 (もっと読む)
(もっと読む)
地理的軌道の軌跡を割り出すための方法
所定の出発位置と所定の終点位置とを有する地理的軌道の軌跡を割り出すための方法は、装置の移動の間に物理的測定データをサンプルとして収集する車載同期センサ一式を備えているデータ収集装置を、前記出発位置から前記終点位置まで移動させるステップと、収集した測定データにもとづき、方位プロファイル、ピッチ・プロファイル、距離プロファイルおよびロール・プロファイルを割り出すステップと、前記方位プロファイル、前記ピッチ・プロファイル、前記距離プロファイルおよび前記ロール・プロファイルにもとづいて前記軌跡を割り出すステップとを有している。出発位置から終点位置までの装置の移動の間、前記物理的測定データのすべてが記憶される。記憶された測定データの取り出し後でかつ前記プロファイルの割り出しの前に、この方法は、前記一式のうちの第1および第2のセンサの測定データにそれぞれもとづいて、第1および第2の軌道パラメータをそれぞれ割り出し、第1の軌道パラメータを第2のパラメータにマッピングするステップと、該マッピングにもとづいて、第1および第2のセンサの測定データの誤差補償を決定するステップと、誤差補償によって第1および第2のセンサの測定データを補正するステップをさらに有している。 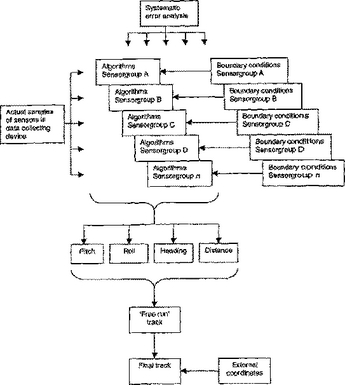 (もっと読む)
(もっと読む)
1 - 5 / 5
[ Back to top ]