
国際特許分類[F16H19/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 本質的に歯車または摩擦部材のみからなり,無限に続く回転運動を伝達することができない伝動装置 (595) | 回転運動と往復運動を相互に変換するためのもの (587)
国際特許分類[F16H19/02]の下位に属する分類
ラックを用いたもの (355)
無端可撓部材を用いるもの (14)
国際特許分類[F16H19/02]に分類される特許
101 - 110 / 218
車両用操作装置
【課題】操作部材を意匠面に沿った回転軸のまわりに回動させ、また回転軸に沿ってスライドすることで複数の操作を正確に、かつ操作部材を掴みながら確実に操作することができ、少ない面積で設置することができる車両用操作装置を提供する。
【解決手段】斜面11Aと略平行な軸14のまわりに回転可能に設けられノブ20の操作で回転する筒状部26と、筒状部26を覆う形で長手方向両端を保持部15により保持された略円筒形状の本体16とで、操作装置12を構成している。本体16は斜面11Aより所定の間隔を開けたことにより、斜面11Aとの間に乗員の手が入り込む程度の間隙が設けられている。筒状部26の径方向外側端に設けられたノブ20を周方向に操作することで、筒状部26を回転可能とされている。またノブ20を軸14方向に操作することにより、筒状部26は軸14に沿ってスライド移動可能とされている。
(もっと読む)
プーリ装置

【課題】プーリ装置の排水機能および雨水や異物の浸入抑制を可能としつつ、左右両側で共用化できるようにすることにある。
【解決手段】プーリ装置25は径方向分割形のプーリケース35と、この内部に収容されケーブル22bが掛け渡されるプーリ本体36とを有している。プーリ軸40を支持する一対の支持孔が形成された第1のケース半体37には係止部45が設けられ、第2のケース半体38には係止部45に係合する係止爪50が設けられている。第1のケース半体37には、一対の支持孔に近接させて一対の排水孔46a,46bが形成され、下側の排水孔46aからプーリケース35の内部に浸入した雨水等が排水される。また、係止爪50には各排水孔46a,46bに隙間Dを介して重なる一対の突出部50bが設けられ、上側の排水孔46bは突出部50bが庇となって雨水や異物等の直接の浸入が抑制される。
(もっと読む)
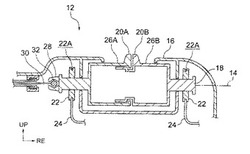
機械的インピーダンスの調節装置とその制御方法、該機械的インピーダンスの調節装置を用いた立ち上がり補助椅子および揺動アーム
【課題】ロボット等の機械装置において、可動部分の機械的インピーダンスを調節することの出来る、従来に無い機械的インピーダンスの調節装置とその制御方法、該機械的インピーダンスの調節装置を用いた立ち上がり補助椅子および揺動アームを提供すること。
【解決手段】駆動源22の駆動力を駆動部材14に伝達する動力伝達経路20上に、誘電体エラストマーによって形成された誘電膜30の両面に電極層32a,32bを形成した誘電体素子26を配設し、該電極層32a,32bへの印加電圧を調節することによって機械的インピーダンスを調節出来るようにした。
(もっと読む)
摩擦圧接装置
【課題】各ボールねじ側からの推力の差が小さい推力機構を有する摩擦圧接装置を提供する。
【解決手段】摩擦圧接装置1であって、保持台3を移動させて一対のワークを押し当てる推力機構4を有し、推力機構4は、推力用モータ4aと、複数のボールねじ軸4b1,4c1と、複数のナット4b2,4c2と、各ナット4b2,4c2と保持台3の間に設けられる複数の推力液圧器5,6を有する。各推力液圧器5,6は、保持台3側に取付けられるシリンダ5a,6aと、ナット4b2,4c2側に取付けられるピストン5b,6bを有し、ピストン5b,6bがシリンダ5a,6a内の液圧によってシリンダ5a,6aに対して推力を発生可能に連結される。推力液圧器5,6の間には、シリンダ5a,6a内の液圧を補正することで各推力液圧器5,6によって保持台3を押す力の差を小さくする補正器7が設けられている。
(もっと読む)
プーリ装置
【課題】支軸とプーリとの間に塗布した潤滑油を長期に亘り保持することができるプーリ装置の提供。
【解決手段】プーリ33の側面部に、底部53と、底部53から立設する壁部54と、支軸摺接部51に向けて開口する開口部55とからなる凹部52を設け、壁部54を、支軸摺接部51に近接する近接壁部54bと、支軸摺接部51から離間する離間壁部54aと、近接壁部54bと離間壁部54aとを接続する傾斜壁部54cとから形成した。支軸32にプーリ33を装着する際に掻き出される余剰の潤滑油を凹部52に溜めることができ、凹部52に溜められた潤滑油は、プーリ33の回転時に遠心力と慣性により離間壁部54a,傾斜壁部54cおよび近接壁部54bに沿って凹部52内を移動して開口部55に到達する。
(もっと読む)
アクチュエータ
【課題】アクチュエータ本体から被駆動体までの距離が異なる全ての車種に簡単かつ安価に対応できるアクチュエータを提供する。
【解決手段】モータ軸3aの回転でアクチュエータ本体2内を往復動するスライダ7と、ケーブル取付部2aに取り付けられ、スライダ7に一端部12aが連結されるインナケーブル12を移動自在に挿入したアウタケーシング15を有したケーブル10とを備え、インナケーブル22の他端部22bが燃料カット弁40に連結されて、スライダ7の往復動でインナケーブル22を介して燃料カット弁を開閉させるエンジンストップアクチュエータ1において、ケーブル10を、ケーブル取付部に取り付けられる所定長の標準ケーブル11と、燃料カット弁40に連結される可変長の調整ケーブル21とで分割構成し、標準ケーブル11と調整ケーブル21の相対向する各端部12b,22a同士を中間ジョイント30にて結合した。
(もっと読む)
送り装置用線状体巻取機構と送り装置と送り方法
【課題】既成技術の長所をできるだけ多く残しながら製作難度の緩和・コストアップの抑制・高速運転時の安定性などかることのできる送り装置用線状体巻取機構を提供する。これを活用した送り装置と送り方法も提供する。
【解決手段】正逆巻付器21・主軸26・副軸29・往復動部材31・原動機34・正巻用線状体51・逆巻用線状体52などを備えている。正逆巻付器21の軸孔24側のガイド内周面部25と主軸26側のガイド外周面部27とによる嵌め合い構造28が両者の嵌め合い部間に介在している。送りネジ30を外周面に有する副軸29が往復動部材31のネジ孔32を貫通している。送りネジ30・ネジ孔32の噛み合いによる送り用ネジ構造33が副軸29と往復動部材31との間に介在している。これらによる構成を主体にして正巻用線状体51と逆巻用線状体52とが同期して等量で巻き取り巻き戻しされる。
(もっと読む)
関節を通るワイヤーと関節の非干渉駆動機構
【課題】 関節を持つ機械の軽量化と、慣性モーメントの軽減による動作の高速化を、ワイヤーを使った、制御のしやすい非干渉機構によって実現する。
【解決手段】 一定の屈曲角比で2段に渡って同一方向に屈曲する関節3に、ワイヤー6の巻き付き弧長の変化が等しくなるよう、屈曲角比の逆比の径を持つ滑車1,2を2つの屈曲軸に配置し、ワイヤー6をたすき掛け状に通すことにより、関節の屈曲時、一方の滑車からほどけたワイヤー6の長さ分が、他方の滑車に巻き付くため、ワイヤー6の繰り出し長に変化がなく、駆動力および変位において、関節3の駆動とワイヤー6の駆動が非干渉となる。
(もっと読む)
マニピュレータ機構
【課題】十分な強度の付与と軽量化を両立させることが出来、然も過大な外力の作用によってアームが折れ曲がったときにも復旧が可能な伸縮式のマニピュレータ機構を提供する。
【解決手段】本発明に係るマニピュレータ機構は、アーム1と、アーム1の基端部が連結されてアーム1の巻き取り及び繰り出しを行なうアーム繰り出し装置2とを具え、アーム1は、弾性を有する複数本のテープ41を束ねてなるテープ集合体4と、テープ集合体4の長手方向に間隔をおいてテープ集合体4に装着されて、前記複数本のテープ41を互いに結束する複数の結束部材5とを具え、前記複数本のテープ41は、1本の連続する帯状弾性資材46を折り畳んで構成され、帯状弾性資材46の一方の端部がアーム繰り出し装置2に巻き取られている。
(もっと読む)
電動式直動アクチュエータおよび電動式ブレーキ装置
【課題】回転軸の外径面と外輪部材の内径面との間で各遊星ローラを負隙間によって予圧することなく、回転軸の回転トルクを各遊星ローラに安定して伝達できるようにすることである。
【解決手段】キャリヤ6の各支持ピン6bに内径面で回転自在に支持された各遊星ローラ7を、各支持ピン6bを包絡するように巻回された縮径リングばね18によって半径方向内方へ付勢し、各遊星ローラ7を回転軸4の外径面に押圧付勢することにより、回転軸4の外径面と外輪部材5の内径面との間で各遊星ローラ7を負隙間によって予圧することなく、回転軸4の回転トルクを各遊星ローラ7に安定して伝達できるようにした。
(もっと読む)
101 - 110 / 218
[ Back to top ]