
国際特許分類[F16H19/02]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 本質的に歯車または摩擦部材のみからなり,無限に続く回転運動を伝達することができない伝動装置 (595) | 回転運動と往復運動を相互に変換するためのもの (587)
国際特許分類[F16H19/02]の下位に属する分類
ラックを用いたもの (355)
無端可撓部材を用いるもの (14)
国際特許分類[F16H19/02]に分類される特許
211 - 218 / 218
直線移動機構およびこれを用いた搬送ロボット
【課題】 簡単な構成により、より正確な直線移動行程を実現できる直線移動機構およびこれを用いた搬送ロボット、さらにはハンドを2つ備えることによってワークの搬送効率を高めた搬送ロボットを提供する。
【解決手段】 ガイド部材1と、このガイド部材1上に設定された水平直線状の移動行程に沿って移動可能な移動部2A,2B材と、これら移動部材2A,2Bを駆動する駆動機構3A,3Bと、を備えた直線移動機構B1であって、駆動機構3Aは、移動行程GLを挟んで配置され、かつ同期駆動される一対の往復動機構を含んでおり、移動部材2Aは、移動行程を挟んで離間する一対の連結部材24aにおいて、上記一対の往復動機構に連結されている。
(もっと読む)
汚泥等回収装置

【課題】駆動系を構成する機構を水中に浸からせずかつ水中で機構同士を接触や摺動をさせないようにして、保守や管理、さらには点検や修理に手数を要さないようにする。
【解決手段】汚泥を端部Qの汚泥ピット11で回収し、スカムを中央部Cのスカムスキマ13で回収するのに、スカムスキマ13を挟む各領域に掻き寄せ機構10P,10Qを設ける。各掻き寄せ機構10P,10Qは、第1、第2の各掻き寄せ板2A,2Bと、沈殿池1の上方より各掻き寄せ板2A,2Bを吊持して移動させる移動機構3とを含む。第1の掻き寄せ機構10Pの移動機構3は、第1の掻き寄せ板2Aを池底aに沿って、第2の掻き寄せ板2Bを水面bに沿って、それぞれ端部Pから中央部Cへ移動させる。第2の掻き寄せ機構10Qの移動機構3は、第1の掻き寄せ板2Aを池底aに沿って中央部Cから端部Qへ、第2の掻き寄せ板2Bを水面bに沿って端部Qから中央部Cへ、それぞれ移動させる。
(もっと読む)
索条の往復移動装置
【課題】 構造が簡単で、組付作業を楽に行うことができるとともに、いかなる場合にも、索条が正規のルートから脱落することがないようにした索条の往復移動装置を提供する。
【解決手段】 巻取ドラム9を枢着した基板7に、テンショナケース30を巻取ドラム9に近接させて着脱可能に装着し、テンショナケース30に、巻取ドラム9より互いに逆方向に延出する両索条15a、15bにそれぞれ圧接する1対のテンションローラ16、17と、各テンションローラを軸着したローラホルダ43とを、それぞれ緊張時の索条15a、15bとほぼ直交する方向に移動可能として装着するとともに、各テンションローラ16、17が索条15a、15bに圧接する方向に各ローラホルダ43を付勢する付勢手段49を設ける。
(もっと読む)
ロボット
【課題】 プーリからワイヤが外れてしまうのを防止することが可能なワイヤ駆動型のロボットを提供する。
【解決手段】 ロボットは、一方側部材16と、その一方側部材16に回転可能に接続されている他方側部材18と、一端部が前記他方側部材18に接続されているワイヤ30、31、32と、そのワイヤ30、31、32の他端部に接続されており、ワイヤ30、31、32を伸縮させるアクチュエータ22、23、24と、そのワイヤ30、31、32の中間部が掛けられており、ワイヤ30、31、32の伸張方向を変化させるプーリ56、57、58と、そのプーリ56、57、58に掛けられたワイヤ30、31、32が反プーリ側に移動してプーリ56、57、58からワイヤ30、31、32が外れるのを規制するワイヤガード70、71、72とを備えている。
(もっと読む)
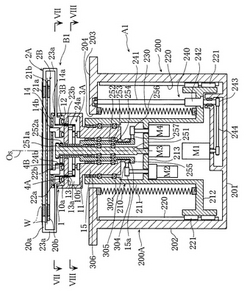
アクチュエータ
本発明は、アクチュエータに関し、特にロボットアームの制御に用いられる直動式アクチュエータおよび回転式アクチュエータに関する。本発明は、実質的にバックラッシュの無い回転運動および/または直線運動を達成する比較的に低コストの手段を提供するものである。本発明で提供するアクチュエータ(10)は、第一の駆動プーリ(28)と、第二の駆動プーリ(29)と、第一の被駆動プーリ(52、70)と、第二の被駆動プーリ(53、72)と、第一の駆動プーリ、第二の駆動プーリ、第一の被駆動プーリおよび第二の被駆動プーリと係合する無端駆動ベルト(40)と、第一の駆動プーリおよび第二の駆動プーリを駆動して無端状駆動ベルトを回転および駆動させるために連結されているモータ(19)と、被駆動プーリのうちの少なくとも一つを支持している被駆動部材(50、88、71、73)とを備えており、第一の駆動プーリおよび第二の駆動プーリが、一緒に回転するように相互に接続され、回転時には、第一の駆動プーリの周速度が第二の駆動プーリの周速度と異なるように配設され、無端ベルトが、第一の駆動プーリの周速度と第二の駆動プーリの周速度との間の差が被駆動部材に動きを生じさせるように、駆動プーリおよび被駆動プーリのまわりに巻き付けられている。 (もっと読む)
送り装置
【課題】
多目的用途の送り装置として、位置決め精度・長距離搬送・遠隔搬送・制御性・高精密送り・高速送り・低価格・簡潔構成・省スペース・軽量化・発塵対策・事故発生に対する安全対策などを満足させるものを提供する。
【解決手段】
正巻器21・逆巻器31・正巻用線状体51・逆巻用線状体61・往復作動体71などを備えている。正巻用線状体51と逆巻用線状体61とが往復作動体71に連結されている。巻き取り回転時の正巻器21と巻き戻し回転時の逆巻器31とが同期かつ同調して同方向または逆方向へ回転する。正巻器21による正巻用線状体の巻き取り量と逆巻器31による逆巻用線状体の巻き戻し量とが互いに等しい。正巻器21による正巻用線状体51の巻き戻し量と逆巻器31による逆巻用線状体61の巻き取り量とが互いに等しい。
(もっと読む)
引張要素駆動装置のための自動プレテンション機構
引張要素駆動装置のケーブルまたは同様な要素をプレテンションするための機構はケーブルのモーター駆動装置をプレテンションのために選択的に結合させる。この機構はケーブルの一部が巻かれたスリーブを使用する。ケーブルの残りの部分の一部はモーターの駆動軸上に反対方向に巻かれる。クラッチはスリーブをモーターの出力軸に接続する。始動機構はスリーブ及びスリーブに巻かれたケーブルの一部の回転を選択的に停止させながら、モーターのトルクが駆動軸に巻かれたケーブルのもう一方の端部に作用することを可能にする。 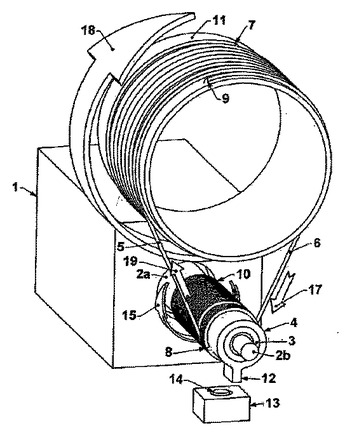 (もっと読む)
(もっと読む)
対象物を二次元的に移動させるのに滑車を利用した取り付け装置およびそれに関連する方法
本発明の実施態様はプラットフォームの両側と連結する支持ラインを使い、対象物を二次元空間を通して移動させる。このラインはプラットフォームのY軸移動とZ軸移動を制御し、YZ移動ラインと呼ばれる。YZ移動ラインの一部を変位させることにより、プラットフォームの縦的変位の移動が可能となる。プラットフォームによりカバーされる領域ではZ軸の変位は横的移動とは実質的に独立に生じるので、複雑なコンピューター制御システムを使う必要はない。Z軸モーター、Y軸モーター、視覚表示エレメント、そして適宜使用される他のマルチメディア装置を配置および支持する取り付けビームもプラットフォームとは独立に配置される。さらにラインは1点で制御されるので、離れた位置のモーターや電気ケーブルは必要ではない。従って、外部の動力を必要とする装置や自らの動力を有しワイヤレス信号を使って操作される装置など、多種類の有用な対象物を取り付けプラットフォームに取り付けることが可能である。 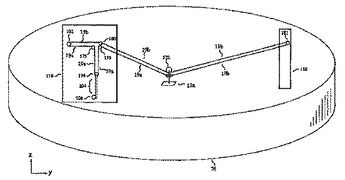 (もっと読む)
(もっと読む)
211 - 218 / 218
[ Back to top ]