
国際特許分類[F16H21/50]の内容
機械工学;照明;加熱;武器;爆破 (654,968) | 機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段 (198,328) | 伝動装置 (51,171) | 主としてリンクまたはレバーのみからなり,滑動部をもつか,またはもたない伝動装置 (548) | 3次元的に運動するもの (86) | 回転運動と往復運動の相互変換用 (22)
国際特許分類[F16H21/50]に分類される特許
1 - 10 / 22
アクチュエータ装置およびこれを用いるロボット装置
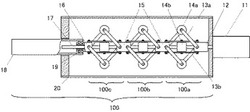
【課題】動力停止時には外力により関節等を容易に動かすことができ、定常的に大きな負荷が作用した場合にも効率を損なわず、アクチュエータ自体を湾曲設置可能として柔軟に配置できるようにしたアクチュエータ装置およびロボット装置を提供する。
【解決手段】モータの回転を線方向の動作に変換するアクチュエータ装置において、モータに直接または間接的に接続されて回転する回転基部(12または15)と、前記回転基部の回転軸上でスライド可能に設けられた摺動基部(15または16)と、前記回転基部とともに回転し遠心力で外側へ移動可能な1以上の錘部材(14)と、前記錘部材と前記回転基部および摺動基部をそれぞれ回動可能に連結する2本のリンク棒を有し、前記遠心力を利用して前記回転基部と摺動基部間の距離を変更するリンク機構(13)とを有するユニットを1以上設けて構成する。
(もっと読む)
首振り装置

【課題】上下左右方向等立体方向に均等に首振り運動ができる首振り装置を提供する。
【解決手段】固定枠部11に、第一揺動軸21,22を介して可動枠部16を軸支すると共に、第三揺動軸32,33を介してガイド部34を有するカムガイド24を軸支する。また、前記可動枠部16に、第二揺動軸30,31を介して、首振り可動部9を軸支すると共に、この首振り可動部9に、前記ガイド部34に案内されて摺動するカム25を設ける。また、首振り用電動機36により駆動される第一ギア39及びこれと噛合する第二ギア40を設け、これらと第一リンク機構42及び第二リンク機構43によって、前記可動枠部16及びカムガイド24を正確に同期させて揺動させる。これによって、前記第一揺動軸21,22を中心とした揺動と、前記第二揺動軸30,31を中心とした揺動とが合成され、前記首振り可動部9が立体的に且つ均等に揺動する。
(もっと読む)
リンク作動装置
【課題】 コンパクトでありながら、可動部の可動範囲が広く、かつ姿勢調整精度が高く、しかも剛性が高いリンク作動装置を提供する。
【解決手段】 入力部材14に対し出力部材15を、3組以上のリンク機構11を介して姿勢を変更可能に連結する。リンク機構11は、入力側および出力側の端部リンク部材11a,11cと、中央リンク部材11bとでなる。リンク機構11は、各リンク部材11a,11b,11cを直線で表現した幾何学モデルが、中央リンク部材11bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。3組以上のリンク機構11のすべてに、入力部材14に対して出力部材15を任意の姿勢で静止させることが可能な静止機構4を設ける。また、入力部材14および出力部材15にそれぞれ形成された被接触部に接触して入力部材14と出力部材15とを互いに連結する構造体5を設ける。
(もっと読む)
パラレルリンク機構および駆動ステージ
【課題】パラレルリンク機構のテーブルの位置精度を向上する。
【解決手段】パラレルリンク機構1は、ベース2と、ベース2に対して6自由度を有し、ベース2と対向して配置されるテーブル3と、一端がベース2に取り付けられ、他端がテーブル3に取り付けられる伸縮可能なロッド4を有する複数の連結部10と、テーブル3の位置の算出に用いる複数のセンサ部14とを備えている。センサ部14は、一端がベース2に取り付けられ、他端がテーブル3に取り付けられるワイヤ12と、ワイヤ12の長さを計測するセンサ13とを有している。
(もっと読む)
5軸を有する力覚提示マニピュレータ
【課題】エンドエフェクタがマニピュレータのベースに対して、3自由度の並進運動および2自由度の回転動作を出力可能であり、小型で、広い範囲の回転動作が可能な力覚提示マニピュレータを提供する。
【解決手段】力覚提示マニピュレータは、マニピュレータのベース10と、エンドエフェクタ60と、エンドエフェクタ60を支持する3本のアーム20a、20b、20cと、エンドエフェクタ60と3本のアーム20a、20b、20cを連結する3本の連結リンク23a、23b、23cと、3本のアーム20a、20b、20cを駆動する駆動手段と、を備える冗長パラレルメカニズムを用いた構成となっている。
(もっと読む)
動力伝動装置
【課題】回転運動や往復運動を、揺動運動を介して回転トルクを高めて回転運動に変換可能な簡単な構成の動力伝動装置を実現する。
【解決手段】第1の往復回転歯車23と第2の往復回転歯車35は、それぞれ往復駆動歯車5に噛み合っており、往復駆動歯車5が時計方向に回転すると、第1の往復回転歯車23は反時計方向に回転して、第1の一方向クラッチ34を介して第1の一方向回転歯車26を反時計方向に回転させ、往復駆動歯車5が反時計方向に回転すると、第2の往復回転歯車35は反時計方向に回転して、第2の一方向クラッチ36及び回転方向変換用機構52を介して第2の一方向回転歯車38を反時計方向に回転させる。
(もっと読む)
往復回転機構
【課題】簡単かつ低コストで製造できる往復回転機構を提供する。
【解決手段】往復回転機構1は、モータの駆動により一方向に回転する入力軸3と、入力軸3の回転に連動して往復回転する出力軸7と、入力軸3と出力軸7の間に設けられた板バネ8よりなる伝動部材とを有している。モータを作動させるとその動力により入力軸3が回転し、それに伴って、入力軸3の先端にあるクランクアーム4とクランクピン43が一体となって旋回し続ける。この旋回動作に連動して、板バネ8が撓曲を繰り返しながら出力軸7を回転軸として揺動し、この揺動に連動して出力軸7が往復回転する。例えばこの往復回転機構を攪拌機に応用することで、往復回転式攪拌機を低コストで簡単に製造することができる。また、従来の往復回転機構で用いていた伝動アームに代えて板バネを利用することで構成部材が減るので、その分組立て工数が減り、簡単かつ低コストで製造することができる。
(もっと読む)
リンク作動装置
【課題】 可動部が自由度機構として構成され、可動部の可動範囲が広く、可動部が軽量で、可動部の位置決め精度が高いリンク作動装置を提供する。
【解決手段】 入力部材104に対し出力部材105を、3組以上のリンク機構101を介して姿勢を変更可能に連結する。リンク機構101は、入力側および出力側の端部リンク部材101a,101cと中央リンク部材101bとでなる。リンク機構101は、各リンク部材101a,101b,101cを直線で表現した幾何学モデルが、中央リンク部材101bの中央部に対する入力側部分と出力側部分とが対称を成す形状である。リンク機構用駆動源121により2組以上のリンク機構101を動作させて、出力部材105の姿勢を制御する。各リンク機構101の配置の内側に通して、可撓性を有し入力部材104および出力部材105の並び方向に回転力を伝達する可撓性ワイヤ4Aを設ける。
(もっと読む)
三次元的動作機構構造体
【課題】小型化された構造で頭の動きを模することができるとともに製造コストを抑え、位置制御を確実でしかも容易に行うことのできる三次元的動作機構構造体を提供すること。
【解決手段】三次元的動作機構構造体は、頭部と、前記頭部の下方に位置するよう配設された胴部と、前記頭部に接続されるとともに、前記胴部に軸支された左右回動部材に連結され、前記左右回動部材を回動することにより、前記頭部を左右に揺動させる左右揺動用平行リンク機構と、前記頭部の前方または後方のいずれか一方に接続されるとともに、前記胴部に軸支された前後回動部材を回動することにより、前記頭部を前後に揺動させる前後揺動用リンク機構と、を備え、前記左右回動部材と前記前後回動部材とを回動することにより、前記頭部を三次元的に動作させるよう構成されている。
(もっと読む)
ロボットの関節機構の制御装置
【課題】ジンバルリンクを有するロボットの関節機構による動作を簡易なアルゴリズムで高精度に解析することができるロボットの関節機構の制御装置を提供する。
【解決手段】固定位置算出手段により、第1モータ191および第2モータ192のモータ角θ1およびθ2から、第1ロッド171および第2ロッド172の他端位置171b,172bを算出しておき、仮ロッド長算出手段12が、一端位置171a,172bの前回値を用いて、第1ロッド171および第2ロッド172の仮ロッド長L´を算出する。そして、ロッド不定位置決定手段16が、この仮ロッド長L´と実際のロッド長Lとの偏差であるロッド偏差ΔDを0に収束させることで、第1ロッド171および第2ロッド172の一端位置171a,172aを決定する。最終角度出力手段17が、一端位置171a,172aから、メインリンク150の姿勢角α,βや手180の姿勢角を算出して出力する。
(もっと読む)
1 - 10 / 22
[ Back to top ]